无题
误差
第一题
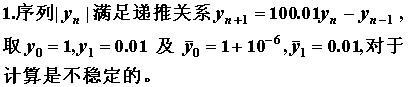
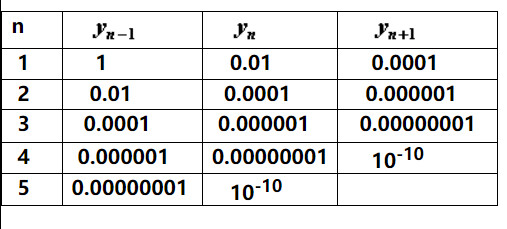
直接带入计算,观察$y_{n+1}、y_{n}、y_{n-1}$的关系,判断以该公式计算是否稳定
第三题

对应原书中内容:1.3 函数的误差估计
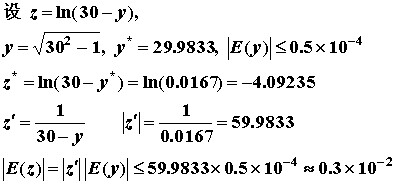
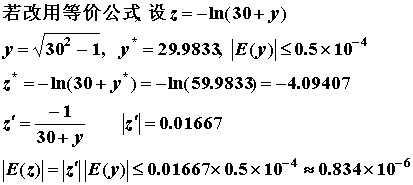
函数套函数的类型,将两层函数分别表示出后:
- 计算出第二层函数的值,计算出$y^*$后,确定出$|E(y)|$的位数
- 不知道算出的$z^*$有什么用
- 计算出导数的绝对值$|z’|$
- 计算出$|E(z)| = |z’||E(y)|$的值,作为误差的判别标准
第五题

对应原书中内容:1.4 近似数的四则运算及数值计算中需注意的几个问题
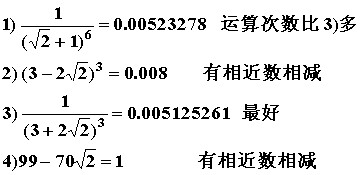
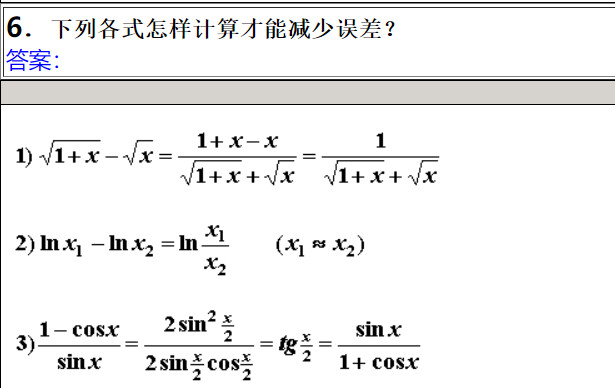
尽量避免:
- 加减运算:
- 避免两个绝对值差不多的数相互抵消
- 不要把绝对值差异很大的数做加减法
- 乘除运算:
- 避免除数接近于0
- 舍入误差的积累:
- 减少运算次数
- 简化步骤
第六题

第十题

对应原书中内容:2.1.1 多项式
秦九韶算法

非线性方程求根
多项式及代数方程根的界
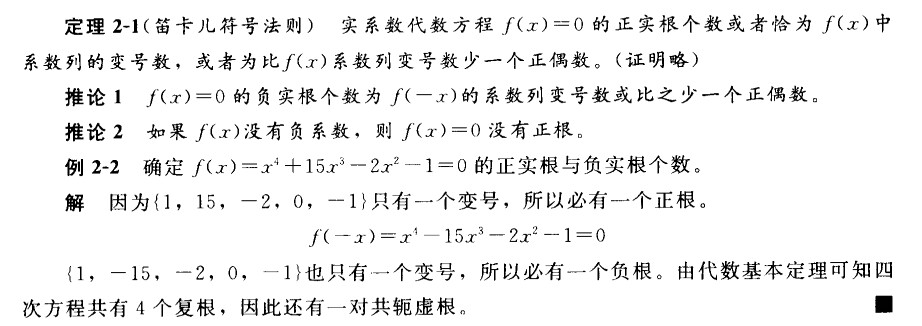
笛卡尔符号法则
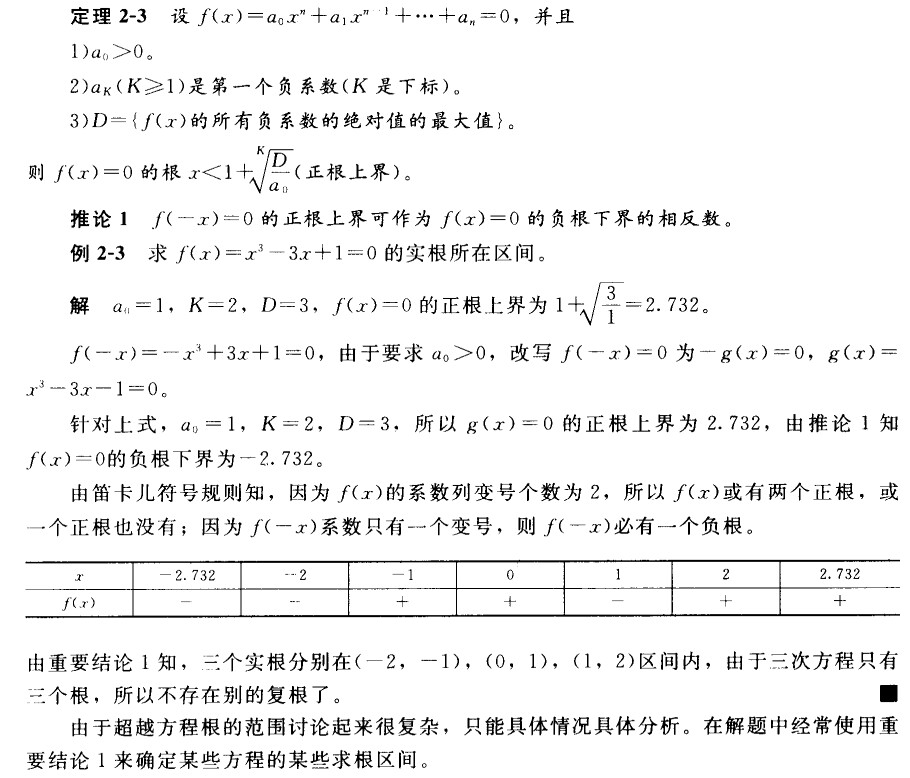
正根上界
二分法
估计二分法的执行次数$K$
其中:
- $b-a$为最初的两个点的值
- $\epsilon$为指定出的精度,如精确到小数点后一位为$0.5\times10^{-1}$
- 其他部分为固定数值
由于最初选定的两个点的不同,$K$的值会有变化
例题

使用笛卡尔符号规则:

由序列${1、-1、-1}$可知变号1次,无法少一个正偶数,则必定有一个正根
由序列${1、1、-1}$可知变号1次,无法少一个正偶数,则必定有一个负根
使用正根上界:
估算$K$值:
这里发生了错误,根据原题目中例子这里取了$b-a = 2$,则计算出的$K$应为6
在得知计算次数为6次后,列表计算:
| $a$ | $b$ | $x=(a+b)/2$ | $f(a)$ | $f(b)$ | $f(x)$ |
|---|---|---|---|---|---|
| 0 | 2 | 1 | -1 | 1 | -1 |
| 1 | 2 | 1.5 | -1 | 1 | -0.25 |
| 1.5 | 2 | 1.75 | -0.25 | 1 | 0.3125 |
| 1.5 | 1.75 | 1.625 | -0.25 | 0.3125 | 0.015625 |
| 1.5 | 1.625 | 1.5625 | -0.25 | 0.015625 | -0.121094 |
| 1.5625 | 1.625 | 1.59375 |
其中保留的是与$f(x)$异号的一项再次进行迭代计算
第六次计算出的区间的中位数即通过二分法估算出的方程的解
简单迭代法
等价方程

等价方程不止一种形式
收敛性
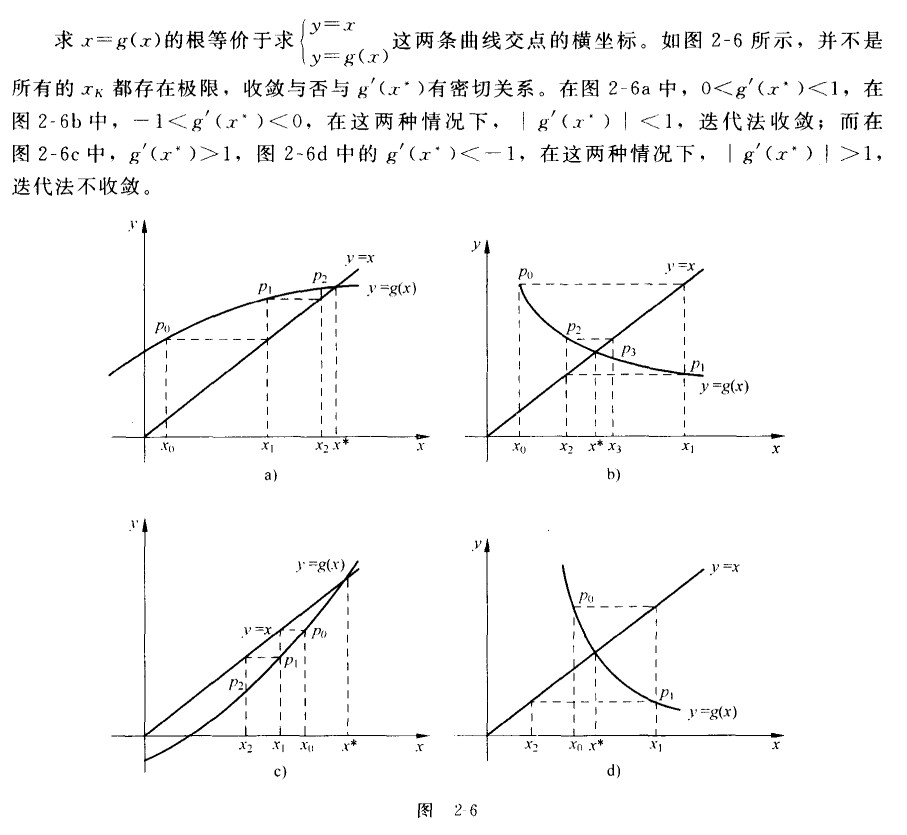
根据等价方程的导数在可行域的绝对值判断其是否收敛:
- $|g’(x^*)| < 1$,迭代法收敛
- $|g’(x^*)| > 1$,迭代法发散
与二分法的对比
$L$为渐进收敛因子
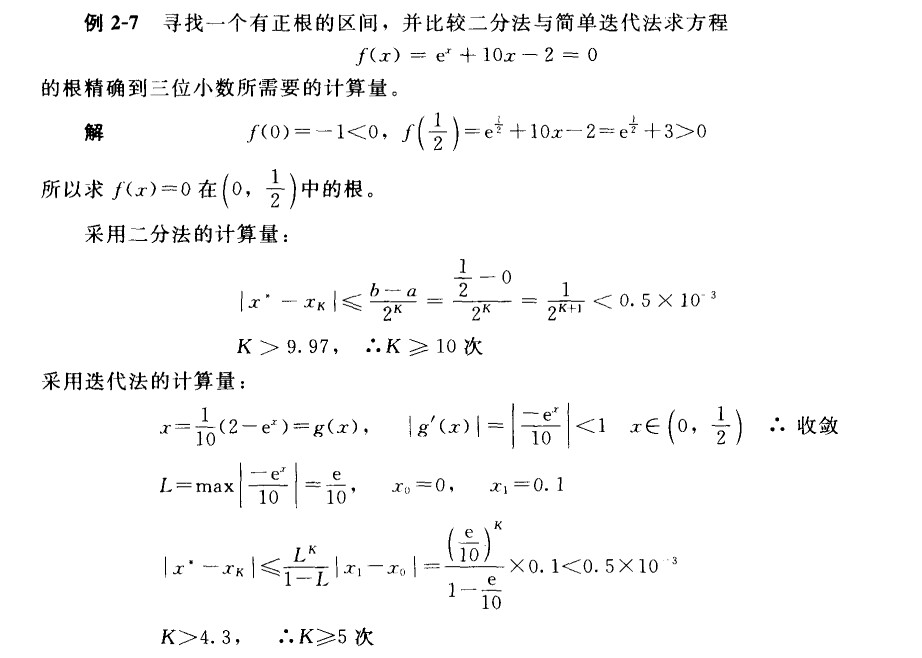
例题
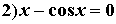
收敛时需要保证:
- 对于选取的等价方程需要满足于特定作用域,方法为证明其单调性,并通过极值判断出取值范围
- 保证等价方程的导数的绝对值小于1
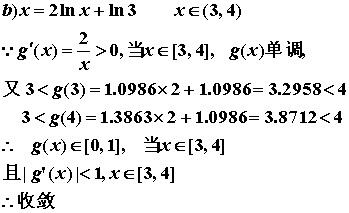
关于如何确定范围:
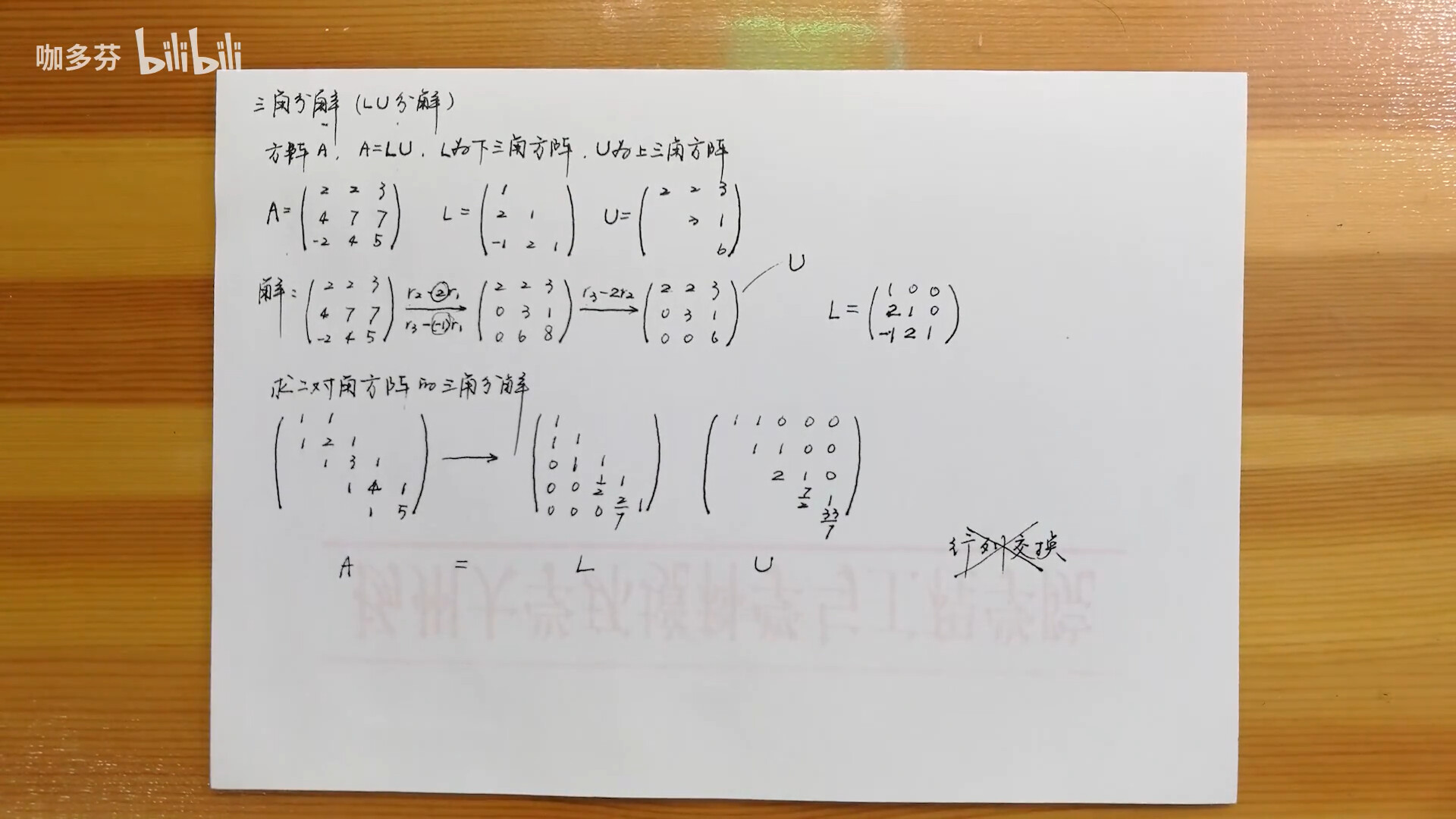
第一题图像如图所示
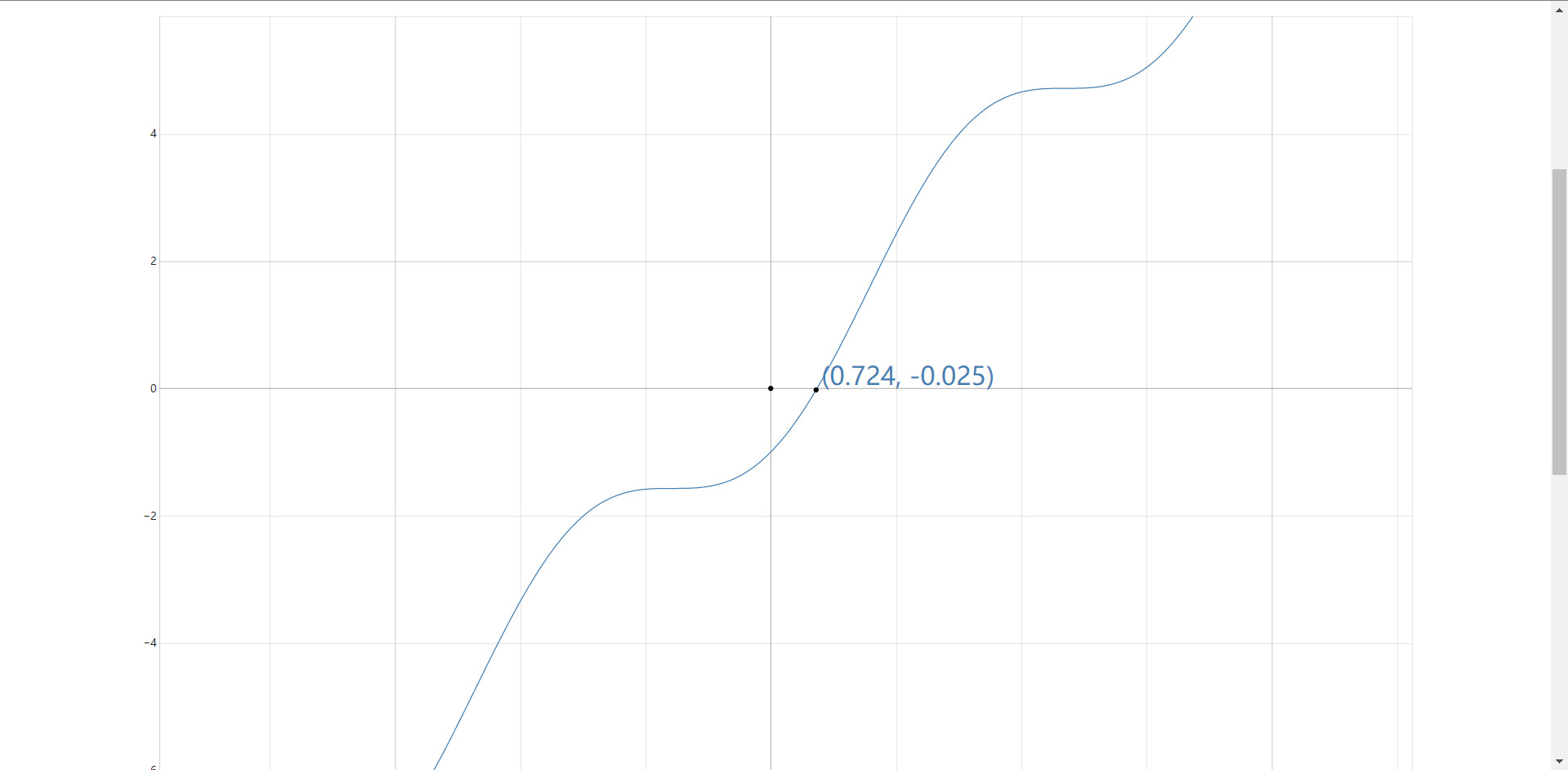
第二题图像如图所示
选取区间时只需要大概地判断出即可
牛顿法
计算步骤
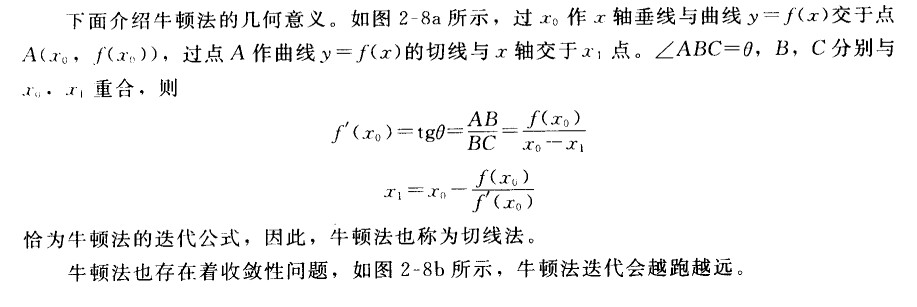
只需要记住牛顿法的迭代公式即可
$$
x_{k+1} = x_k - \frac{f(x_k)}{f’(x_k)}
$$
例题

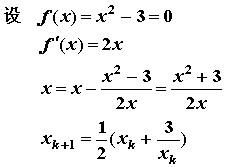
根据公式计算出公式后直接计算即可
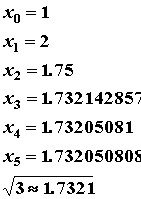
只要出现结果停止变化的情况就可以停止计算
收敛性判断

满足以上几点就可以证明收敛
例题

解线性方程组的直接法
【计算方法】零基础入门矩阵1(第五期)矩阵消去法 全主元 列主元 三角分解 LU分解 PLU分解_哔哩哔哩_bilibili
高斯消元法
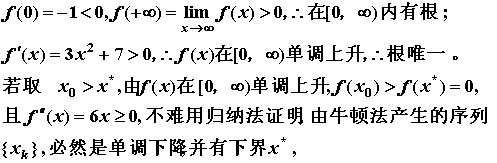
全主元法
- 从A中选取绝对值最大的数作为主元
- 交换行列,让主元位于$a_{11}$位置,这步可以忽略
- 消元计算
- 在A中的第N-K+1行、列选取下一个主元,选取标准为这些数的最大值,且不与之前的主元处于同一行
- N:行数
- K:消元次数
- 交换行列,让主元位于$a_{11}$位置,这步可以忽略
- 重复消元计算,直到所有行都存在主元
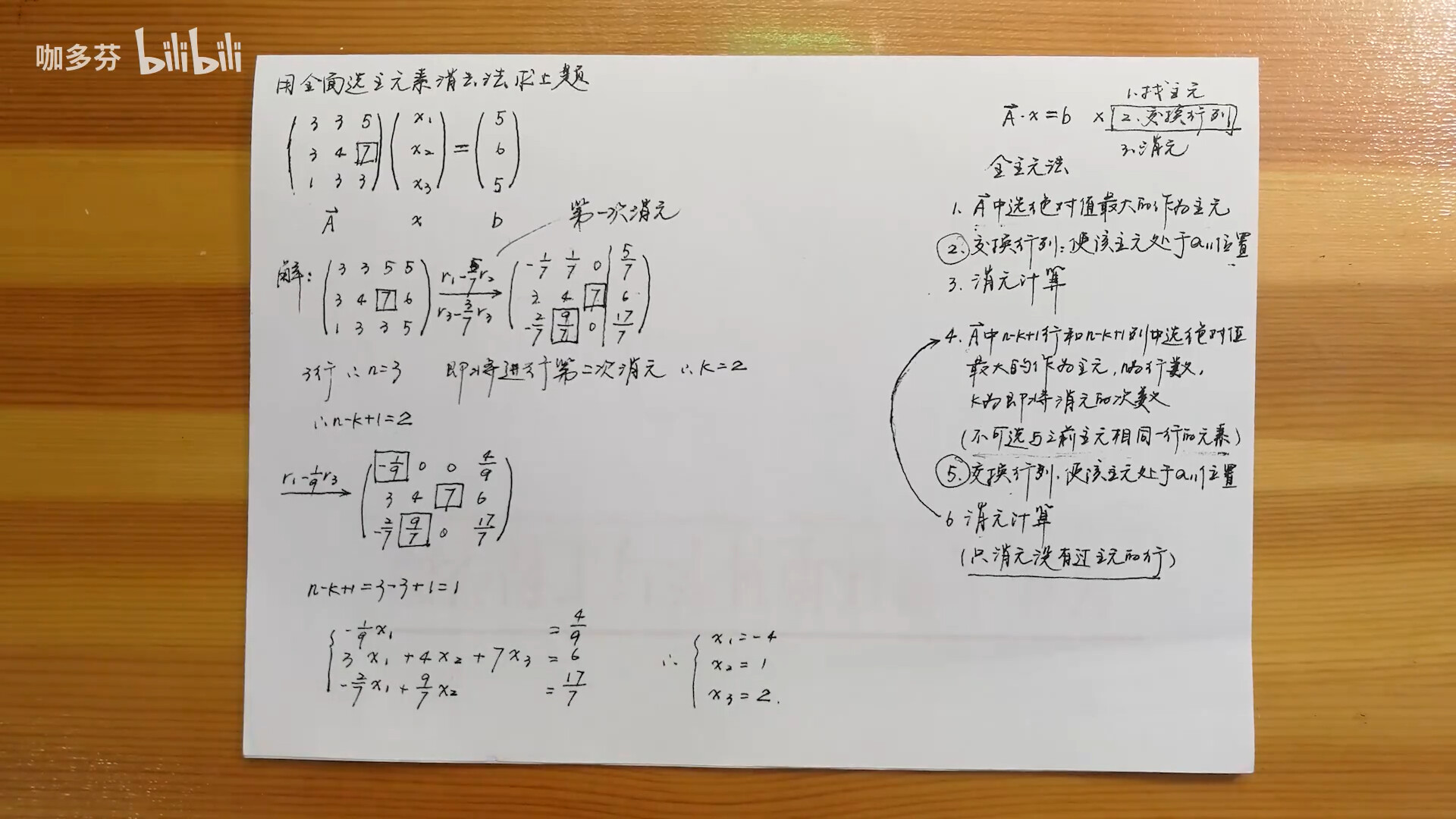
列主元法
与全主元法规则类似,只是主元的选取标准改变为从每一列中选取一个
三角分解法
道立特分解法
【计算方法】零基础入门矩阵1(第五期)矩阵消去法 全主元 列主元 三角分解 LU分解 PLU分解_哔哩哔哩_bilibili
【数值分析】矩阵LU三角分解| 速成讲解 考试宝典_哔哩哔哩_bilibili
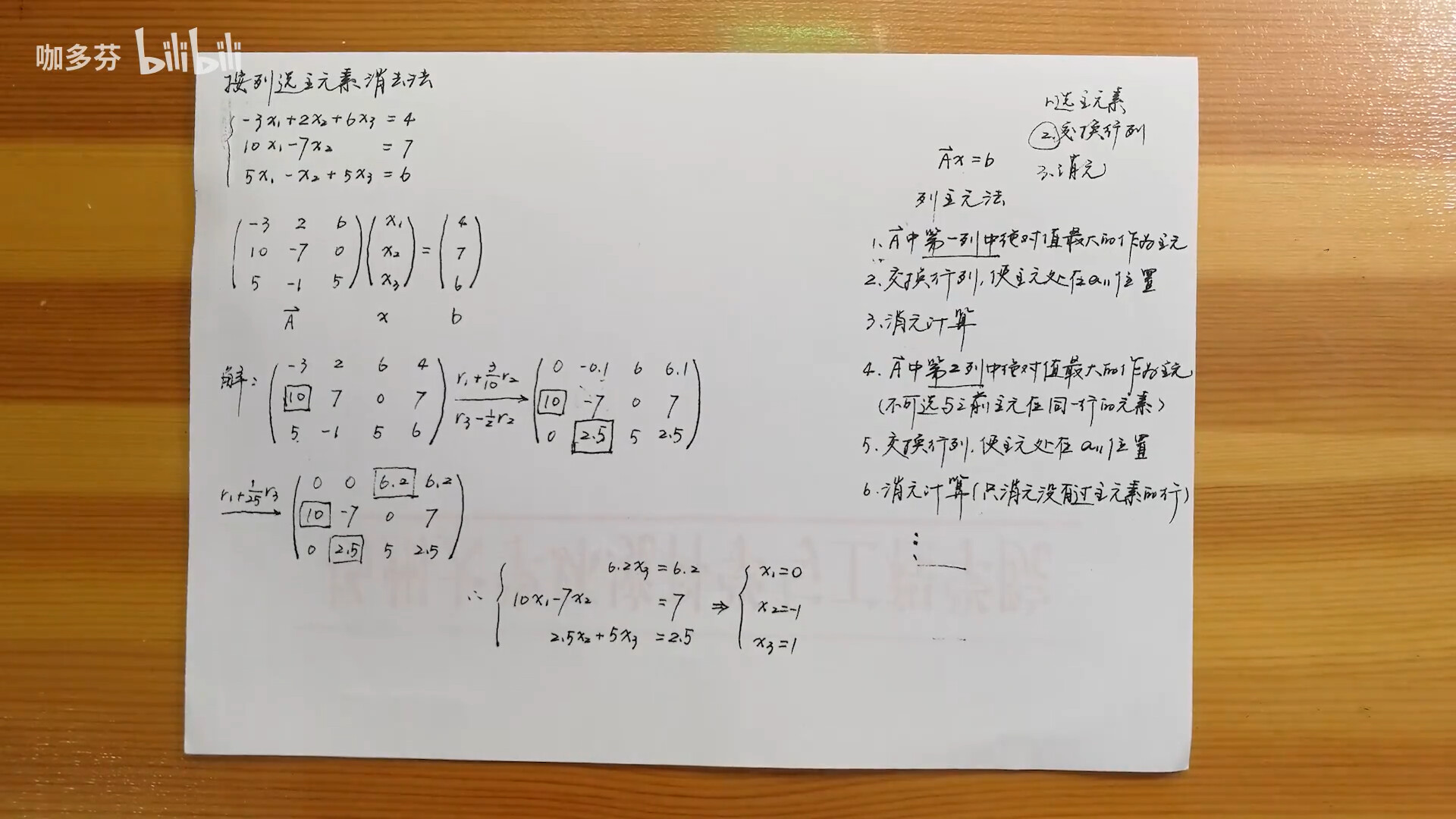
需要将方程组表示为矩阵的形式后
将A分解为L和U的形式,A=LU,其中L是单位下三角矩阵,主对角线全为1,U是上三角矩阵
首先按照消元法求出U,后根据求取U时的列向量减系数填补出L
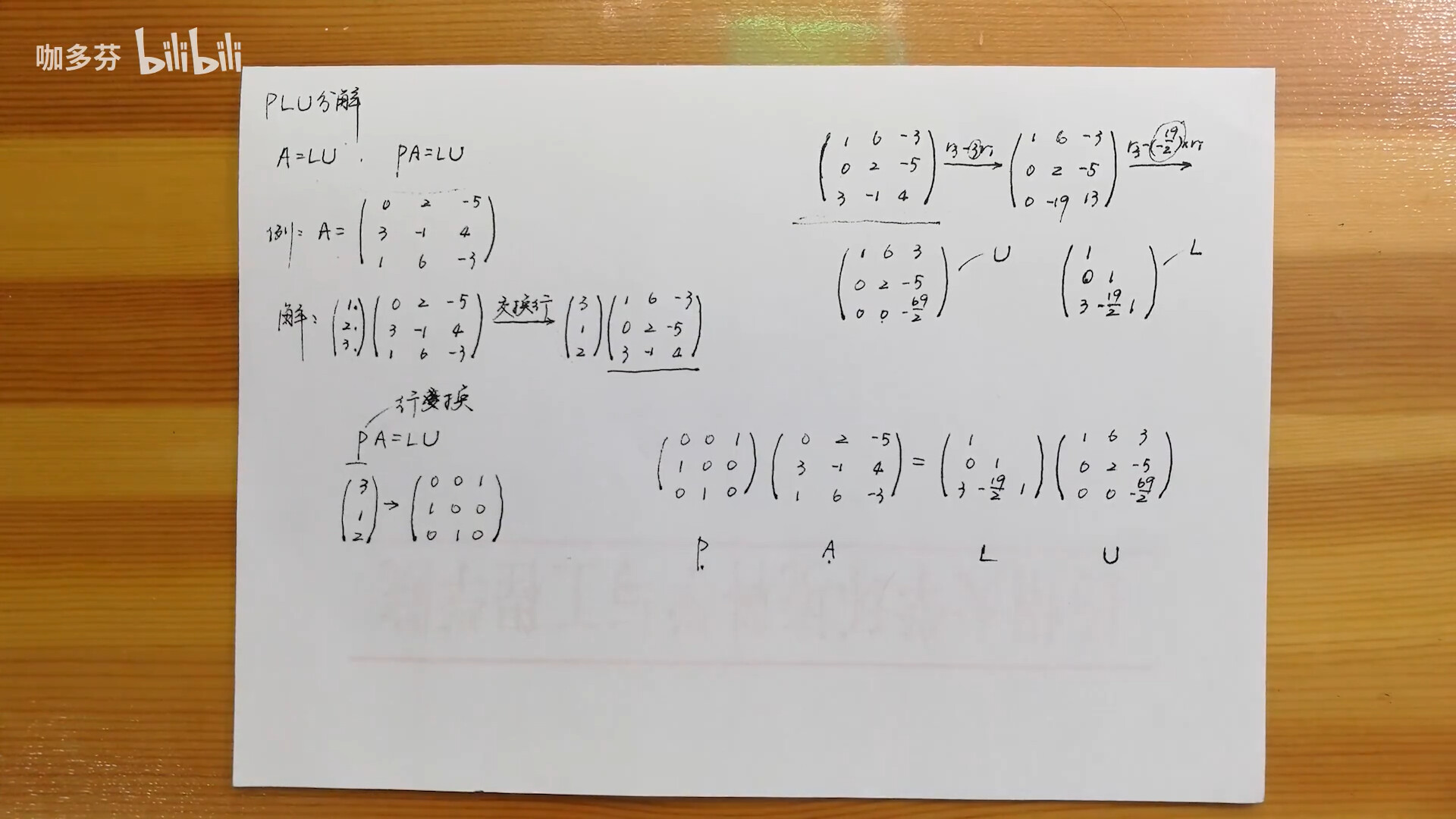
对于$a_{11} = 0$的情况,需要进行PLU分解,即在A=LU的等式前左乘一个P,组成PA=LU

根据分解出的LU列出UX=Y、LY=b的式子,后分别求取其中结果
平方根法公式求解
对于正定矩阵:
- 对称的
- 特征值都大于0的
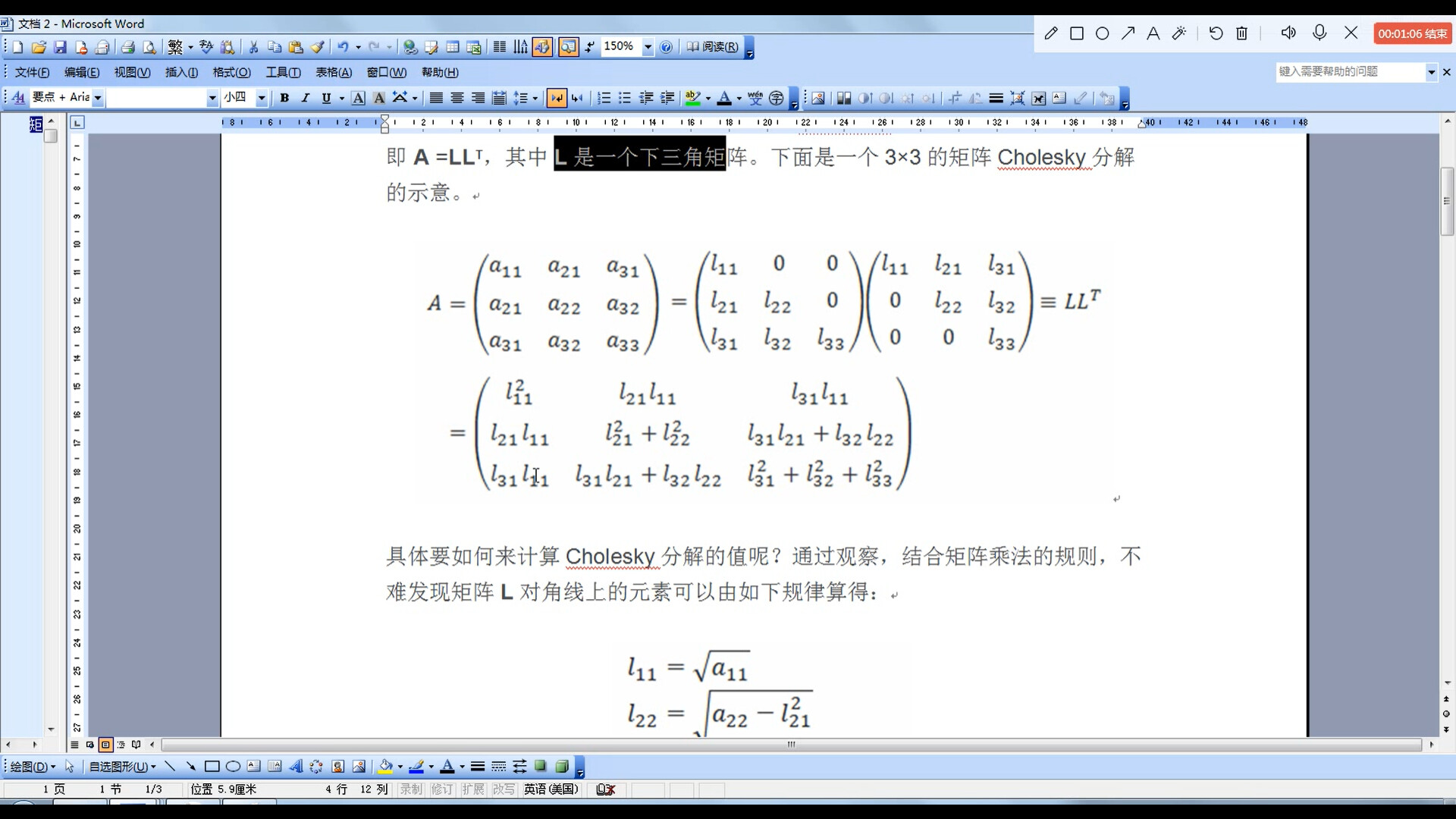
将其分解为一个矩阵和其转置矩阵的乘积,其中对应的映射关系如图所示
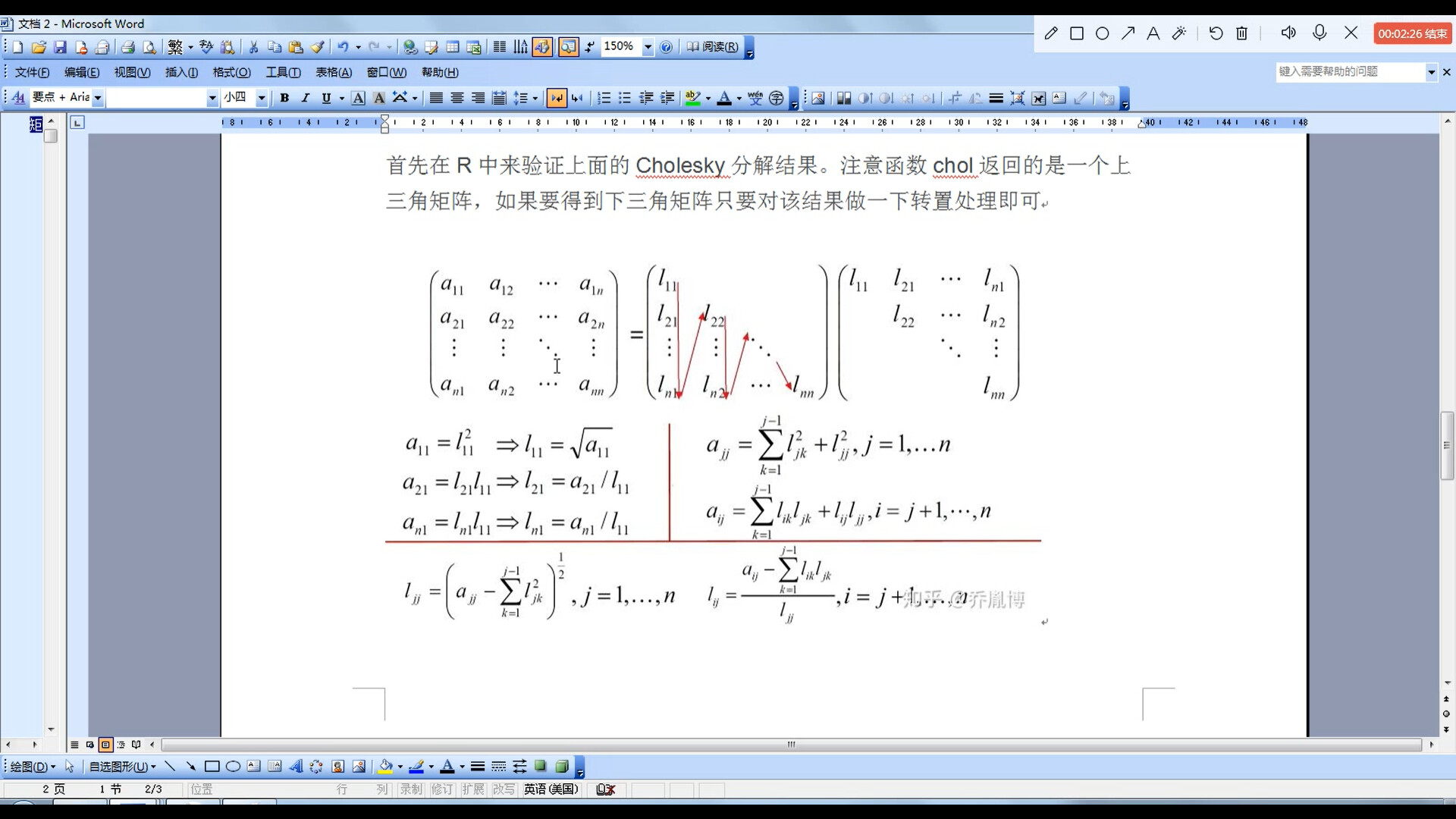
其计算方式是按列来的
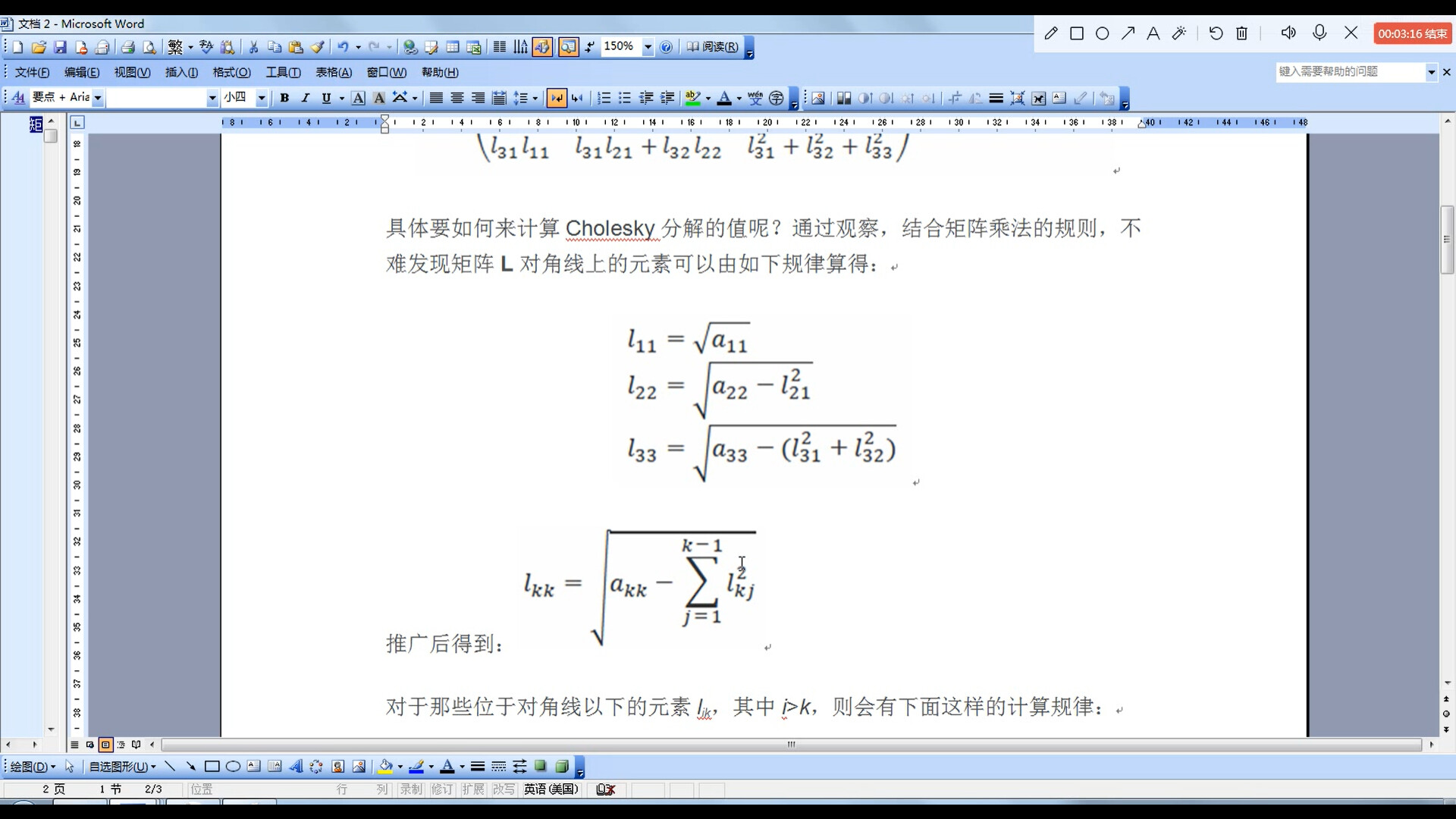
其中对角线上的元素规律如图所示
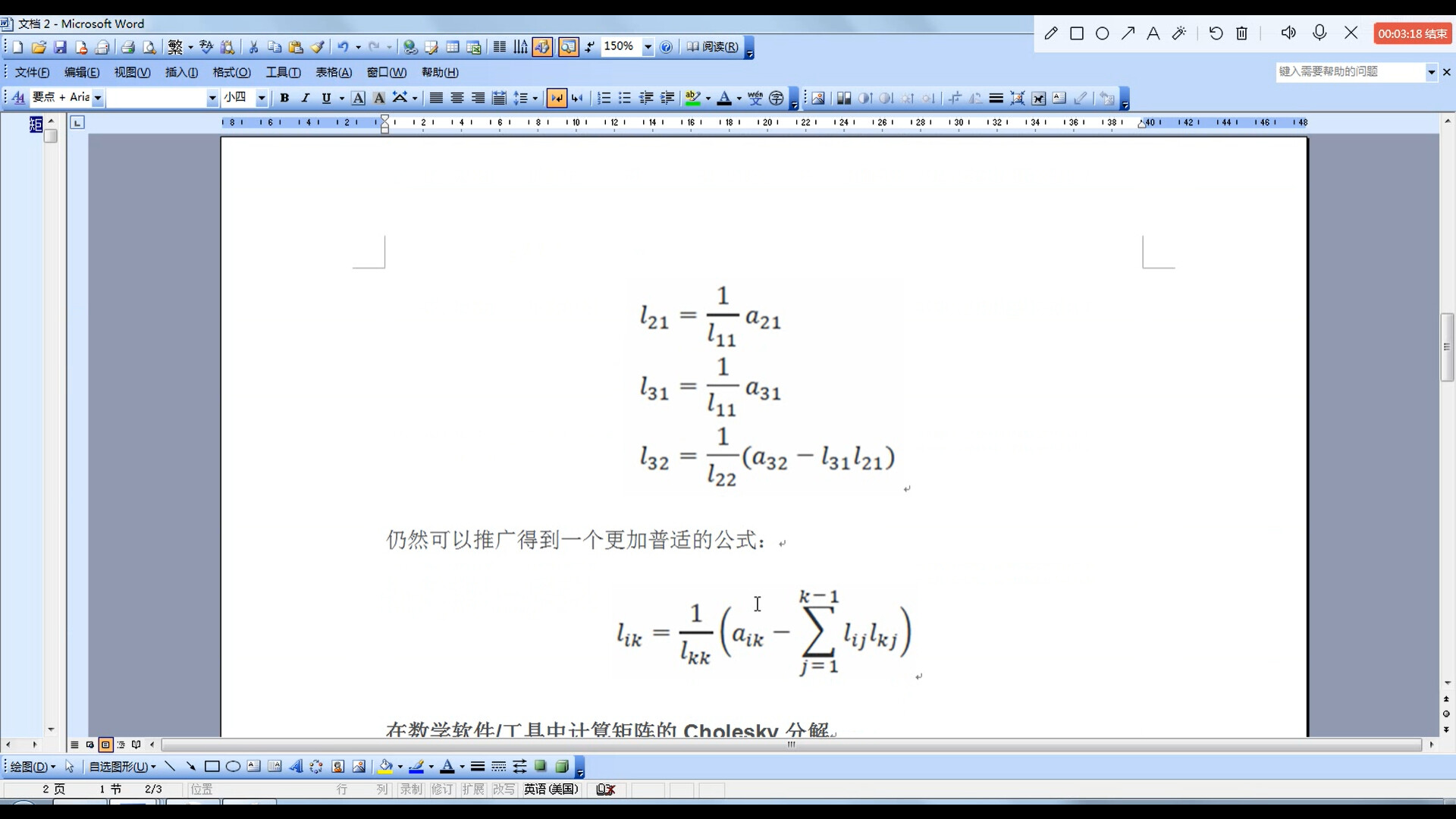
对角线元素下的元素规律如图所示
例题
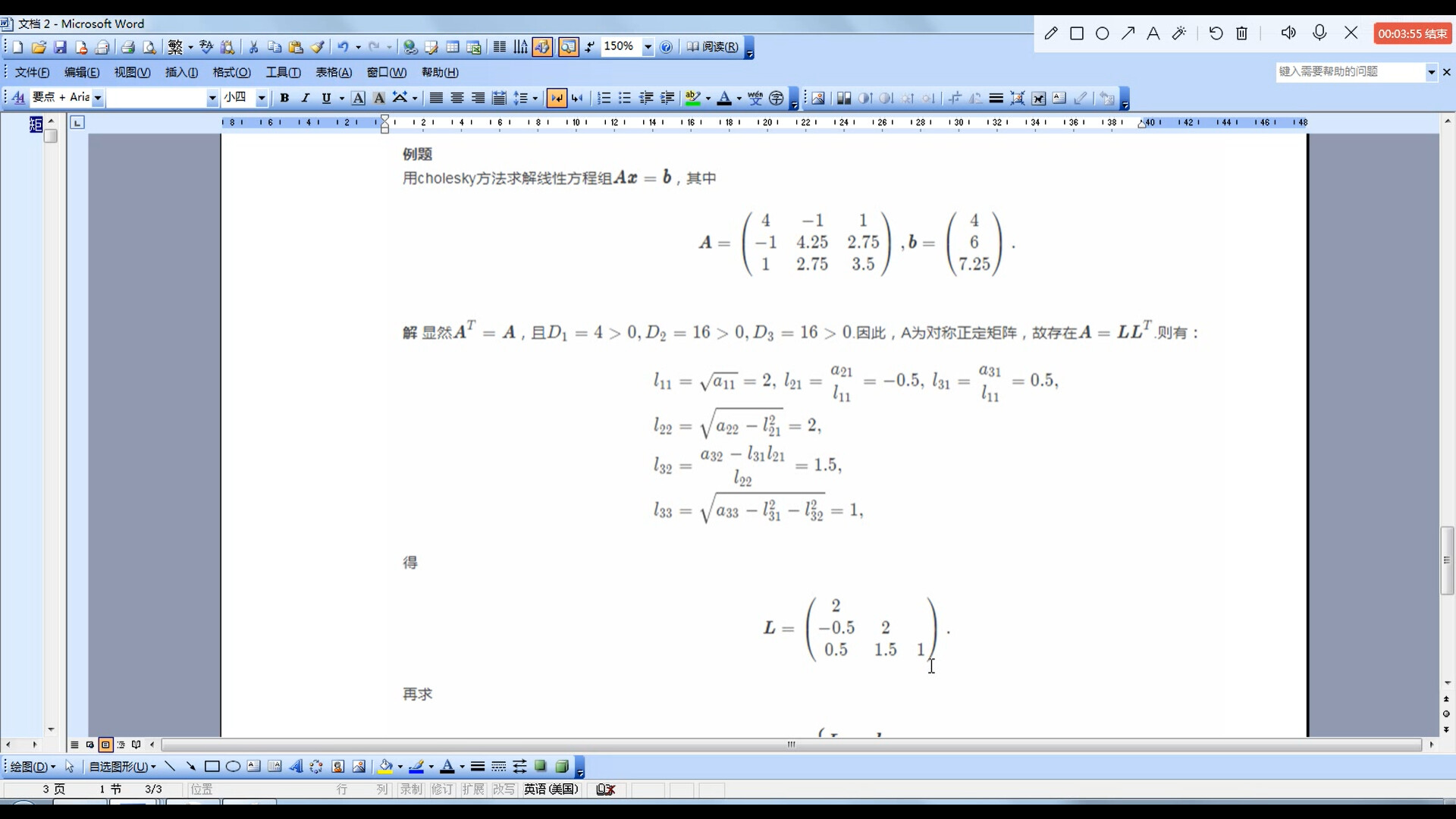
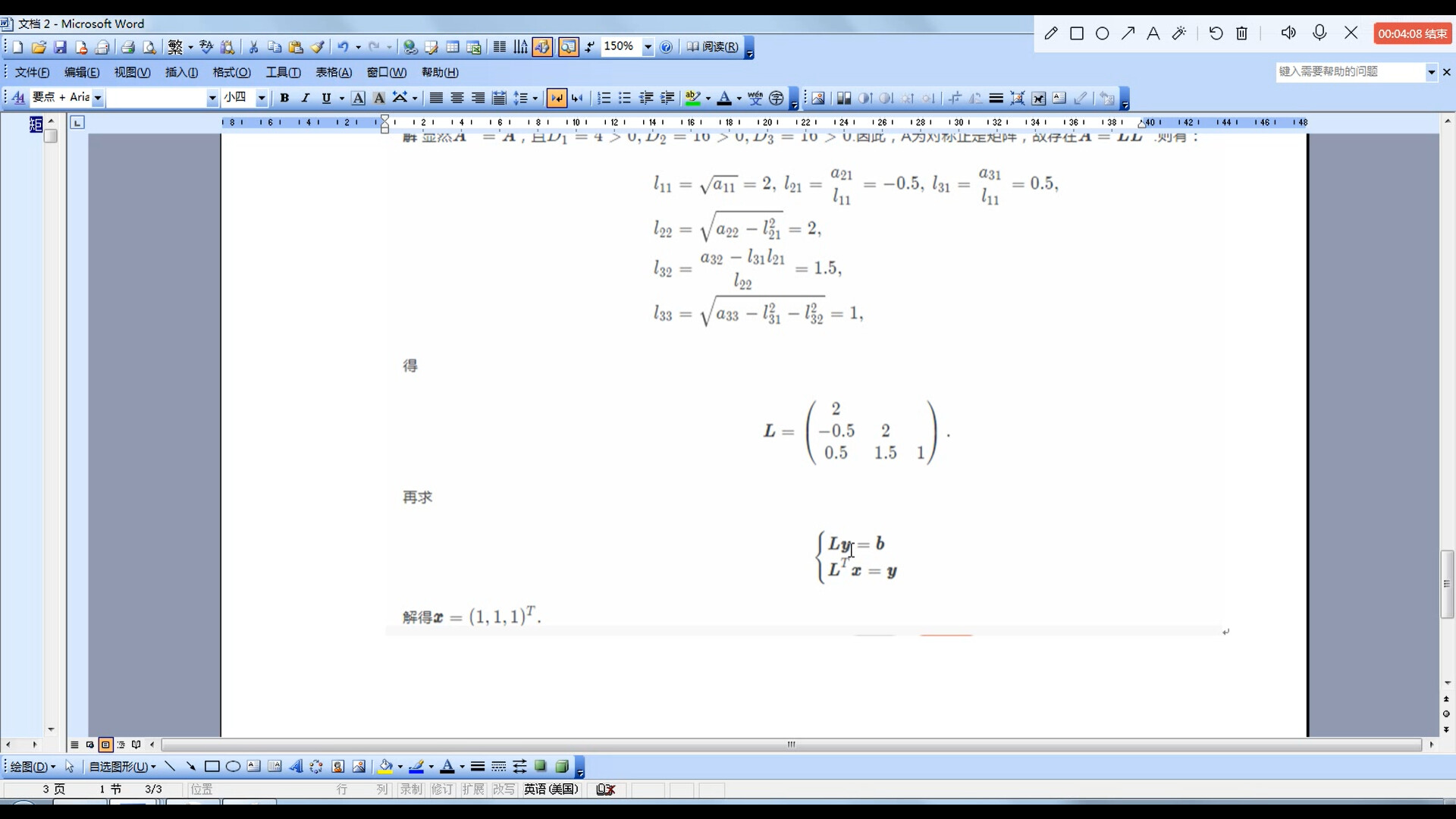
求出$A = L^TL$后,按照$Ly = b$、$L^Tx = y$的式子求出最后$x$的结果
$$
\begin{cases}
Ly = b \
L^Tx = y \
\end{cases}
$$
平方根法
【数值分析】矩阵三角分解|速成平方根法和追赶法 解线性方程组_哔哩哔哩_bilibili
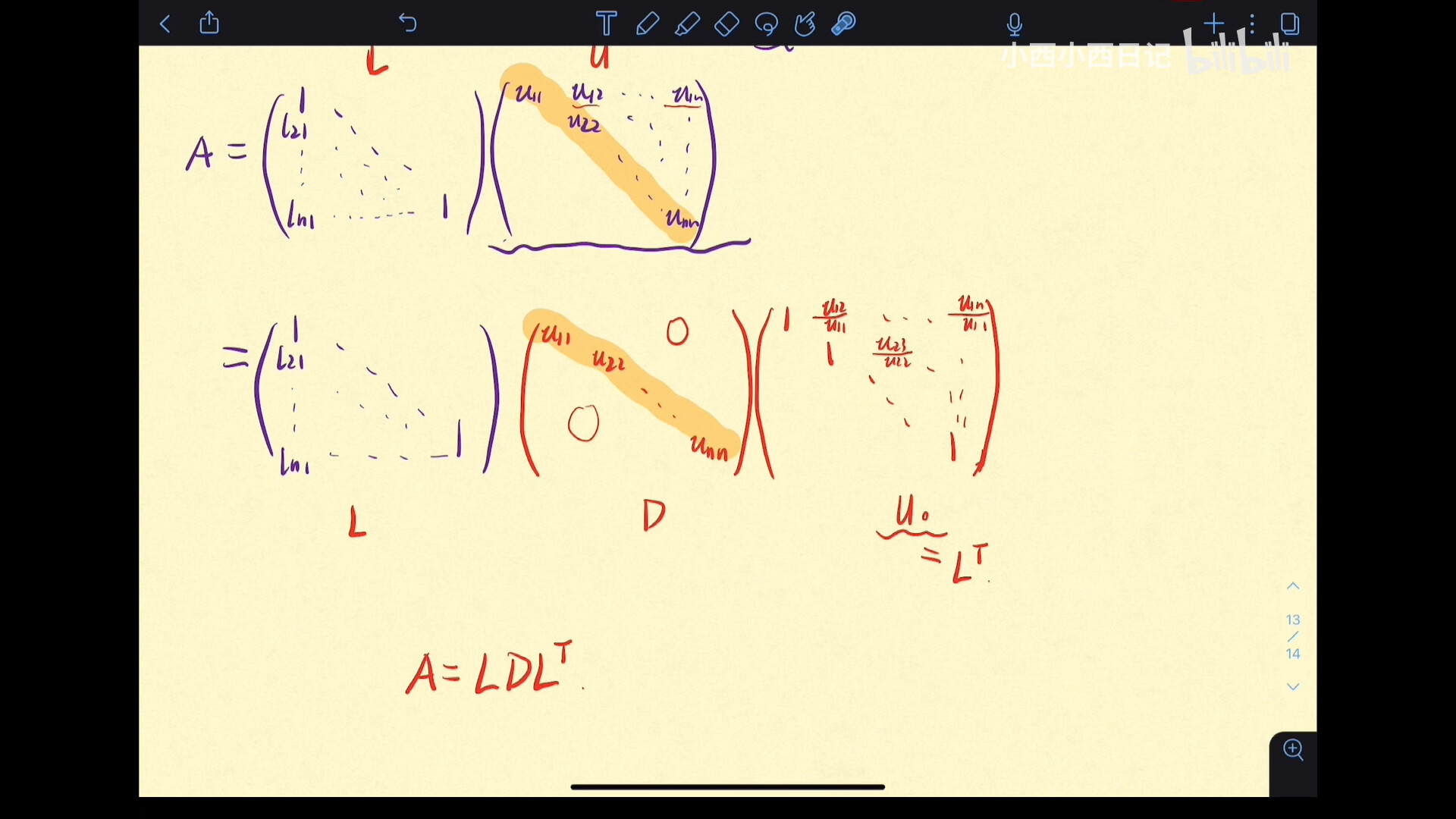
A=LU在A是正定矩阵的情况下具有如上性质:可将U表示为$DL^T$
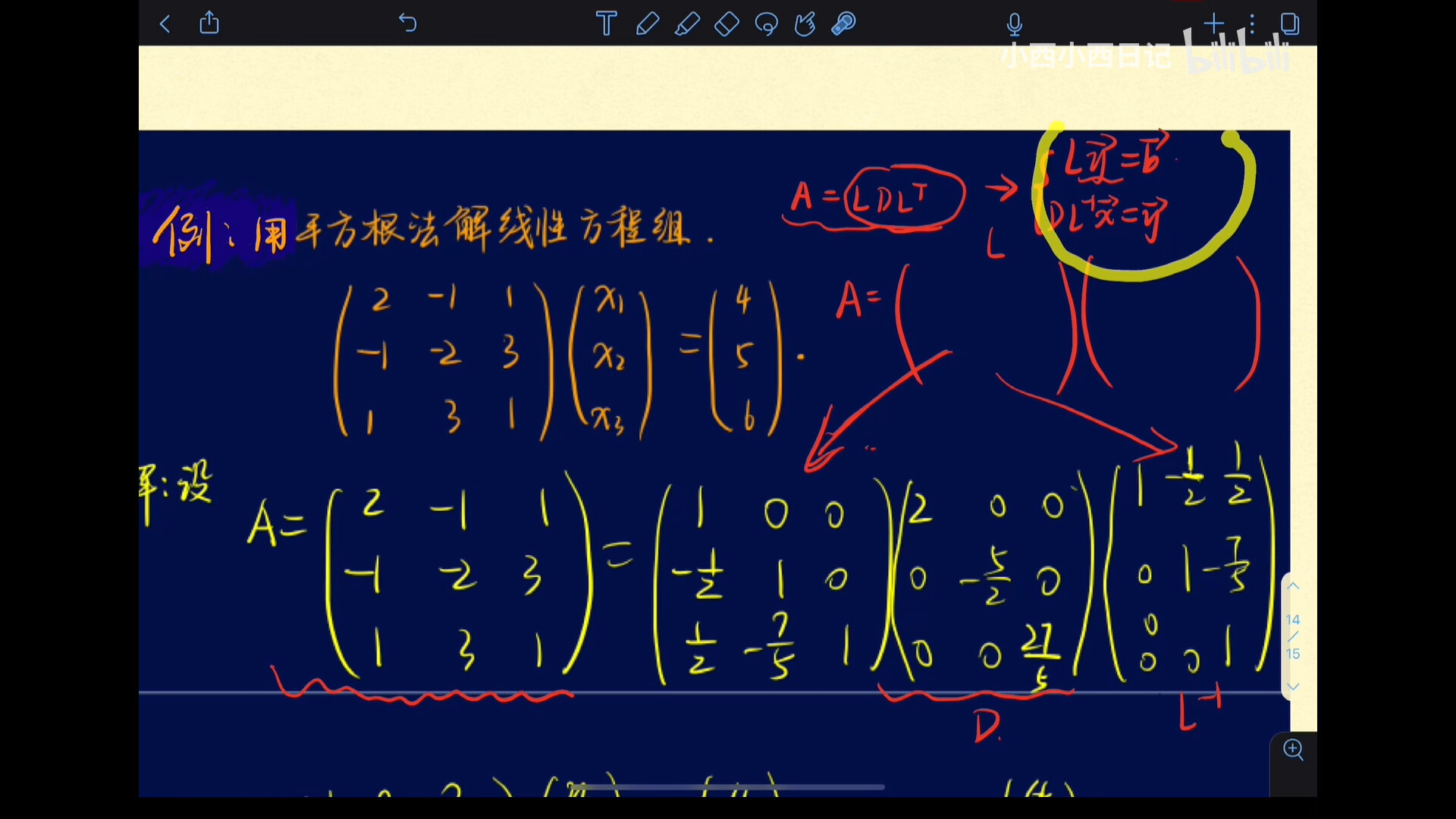
计算时首先分解为A=LU的形式再转变为A=$LDL^T$的形式
其中:
- L不变直接照抄
- D的主对角线元素等同于U的主对角线元素
- L转置得到$L^T$
之后按照正常方法求解,公式略有变化
$$
\begin{cases}
Ly = b \
DL^Tx = y \
\end{cases}
$$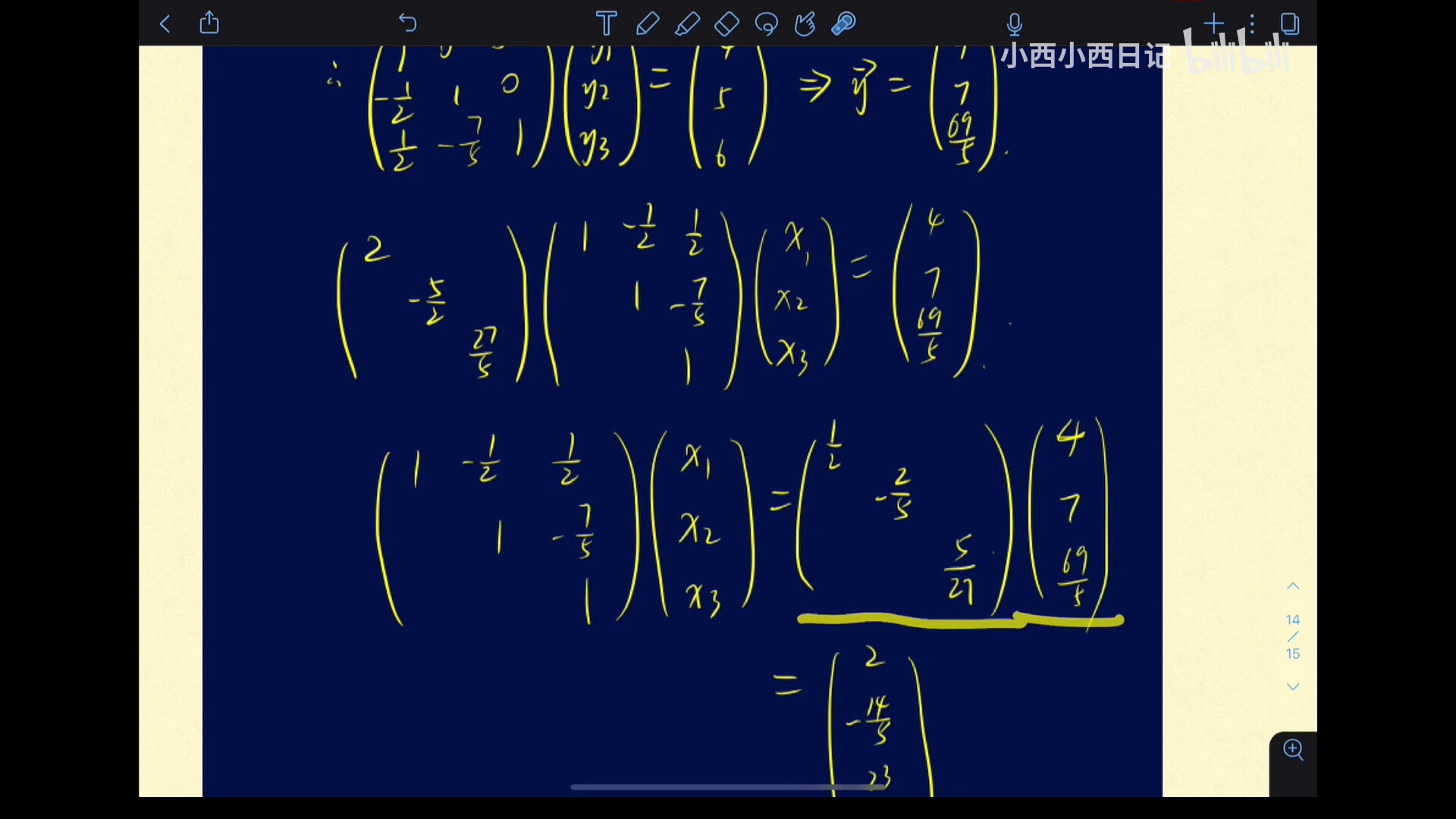
计算时可将两边同时左乘一个D的逆,将D移到等式右边运算,简化计算
追赶法
【数值分析】矩阵三角分解|速成平方根法和追赶法 解线性方程组_哔哩哔哩_bilibili
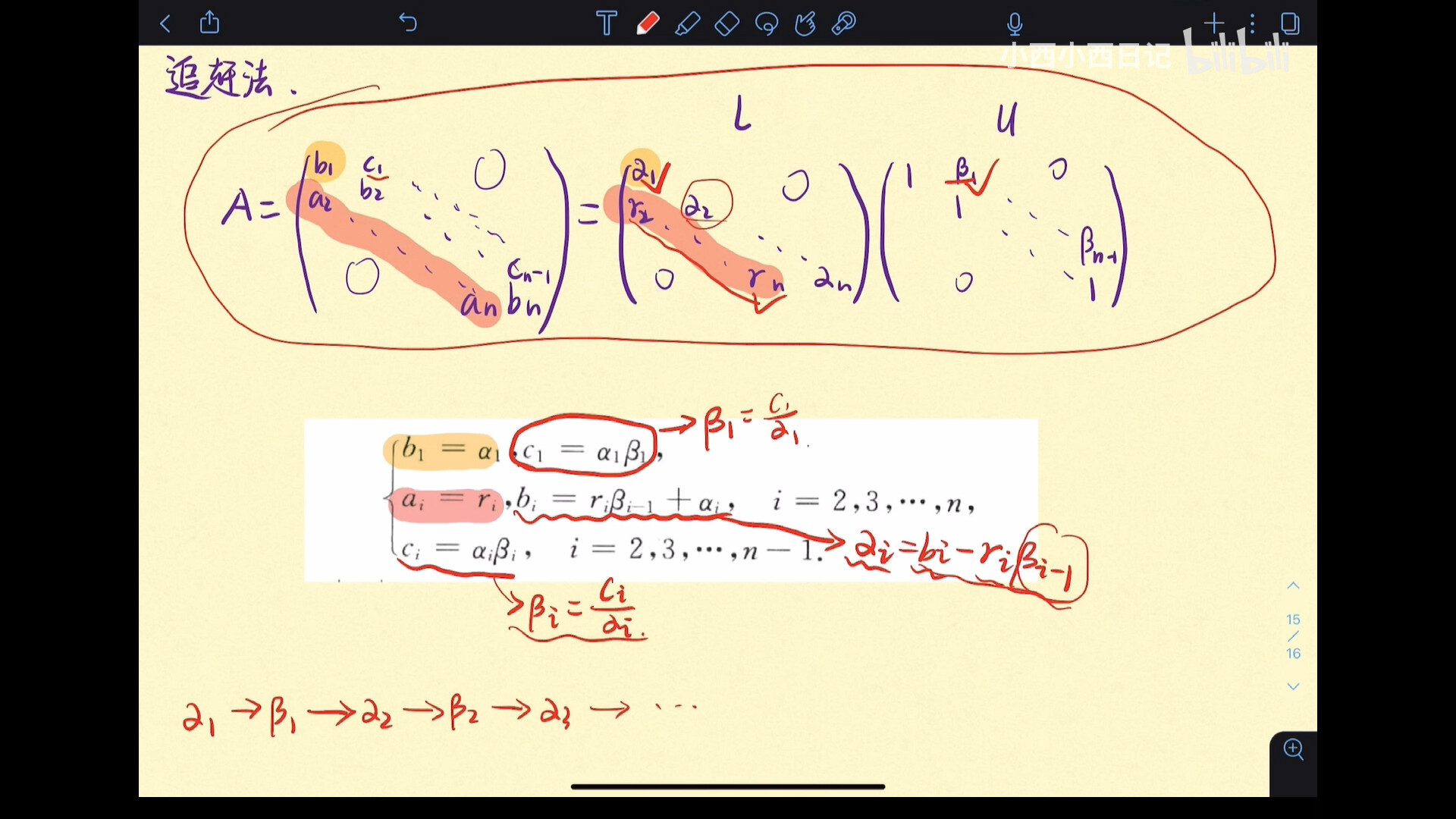
对形如这样的三对角线方程组,采用追赶法计算
- 首先根据公式得出L的$a_{11}$和下方的一条斜对角线
- 依次计算图中的$\beta_1$、$\alpha_2$、$\beta_2$、$\alpha_3$等等
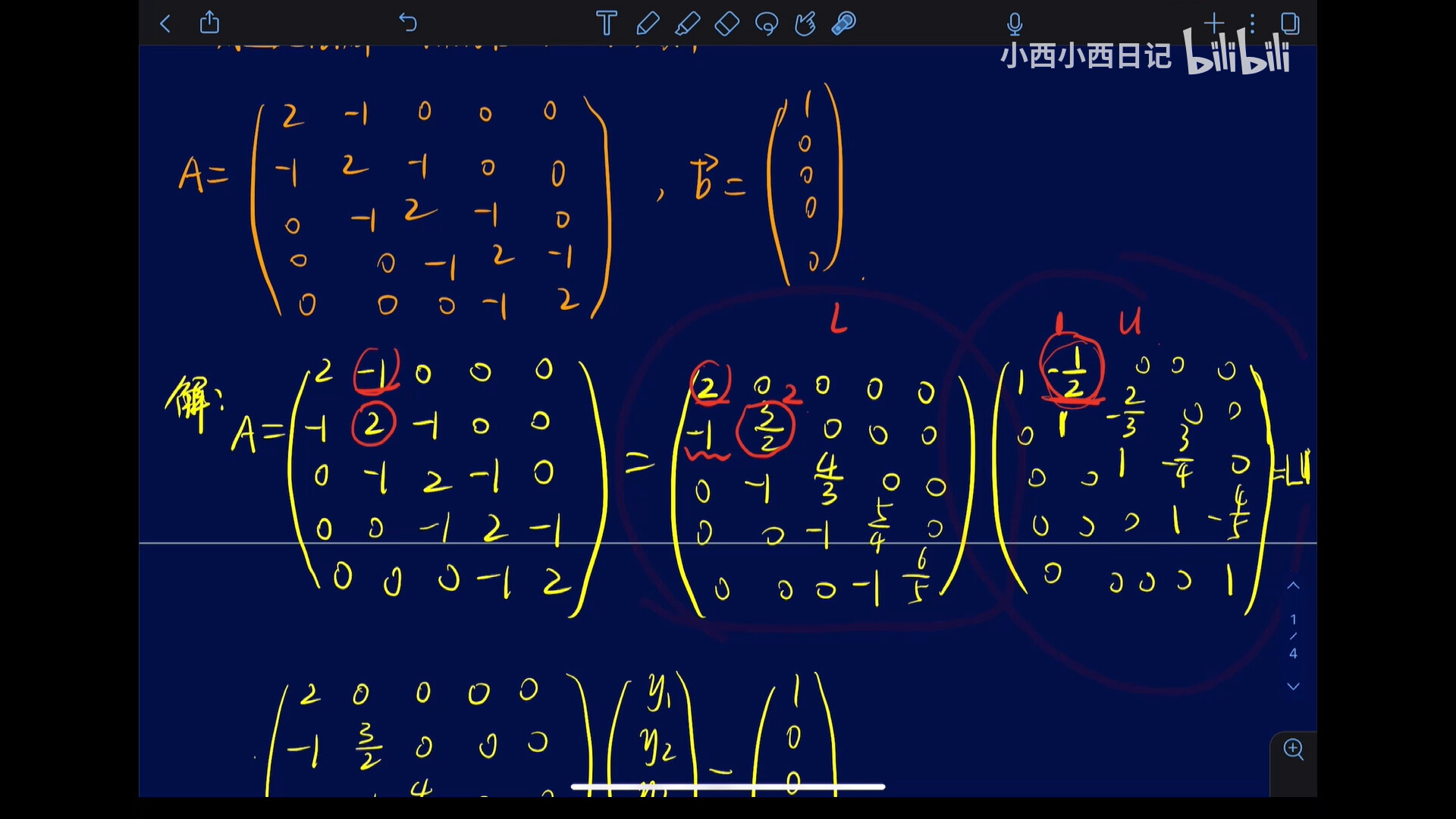
将结果依次求出,其中:
- $-\frac{1}{2} = 2 \div -1$
- $\frac{3}{2} = 2 - (-1) \times (-\frac{1}{2})$
- $-\frac{2}{3} = -1 \div \frac{3}{2}$
规律为:
- L中的未知量,即主对角线元素,为A中同位置元素,减去L中左方元素和左上方元素的乘积
- U中的未知量,即主对角线上的对角线元素,为A中同位置元素,除以L中同位置的左方元素,也是上一步求得的结果
算出L和U以后,按照常规方法求出未知数
$$
\begin{cases}
Ly = b \
L^Tx = y \
\end{cases}
$$
解线性方程组的迭代法
向量和矩阵的范数
数值分析 范数与条件数 期末干货 期末突击_哔哩哔哩_bilibili
矩阵论(第五章)向量,矩阵的范数-期末快速复习_哔哩哔哩_bilibili
数值分析 计算矩阵特征值及谱半径 保姆教程_哔哩哔哩_bilibili
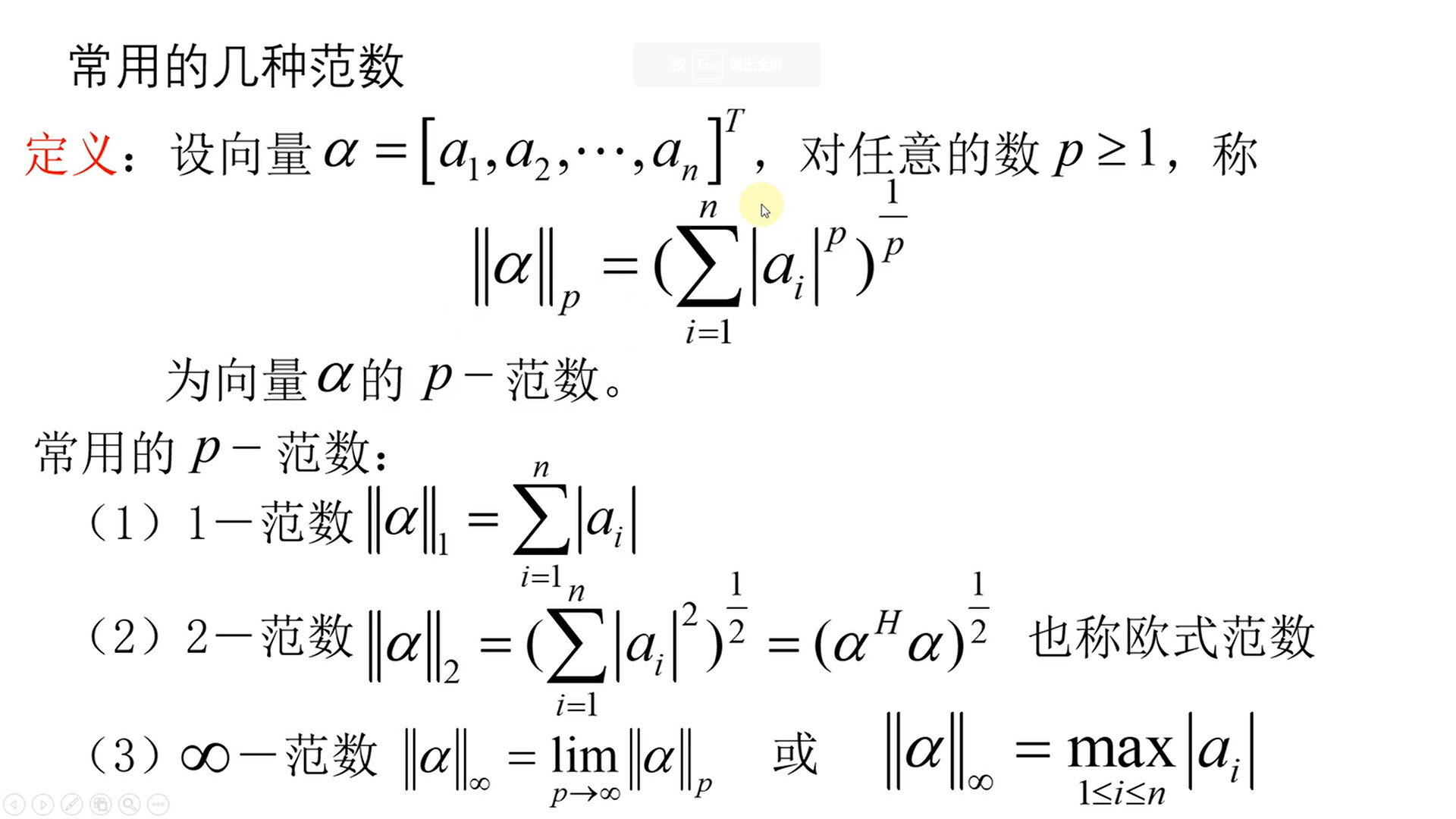
向量范数
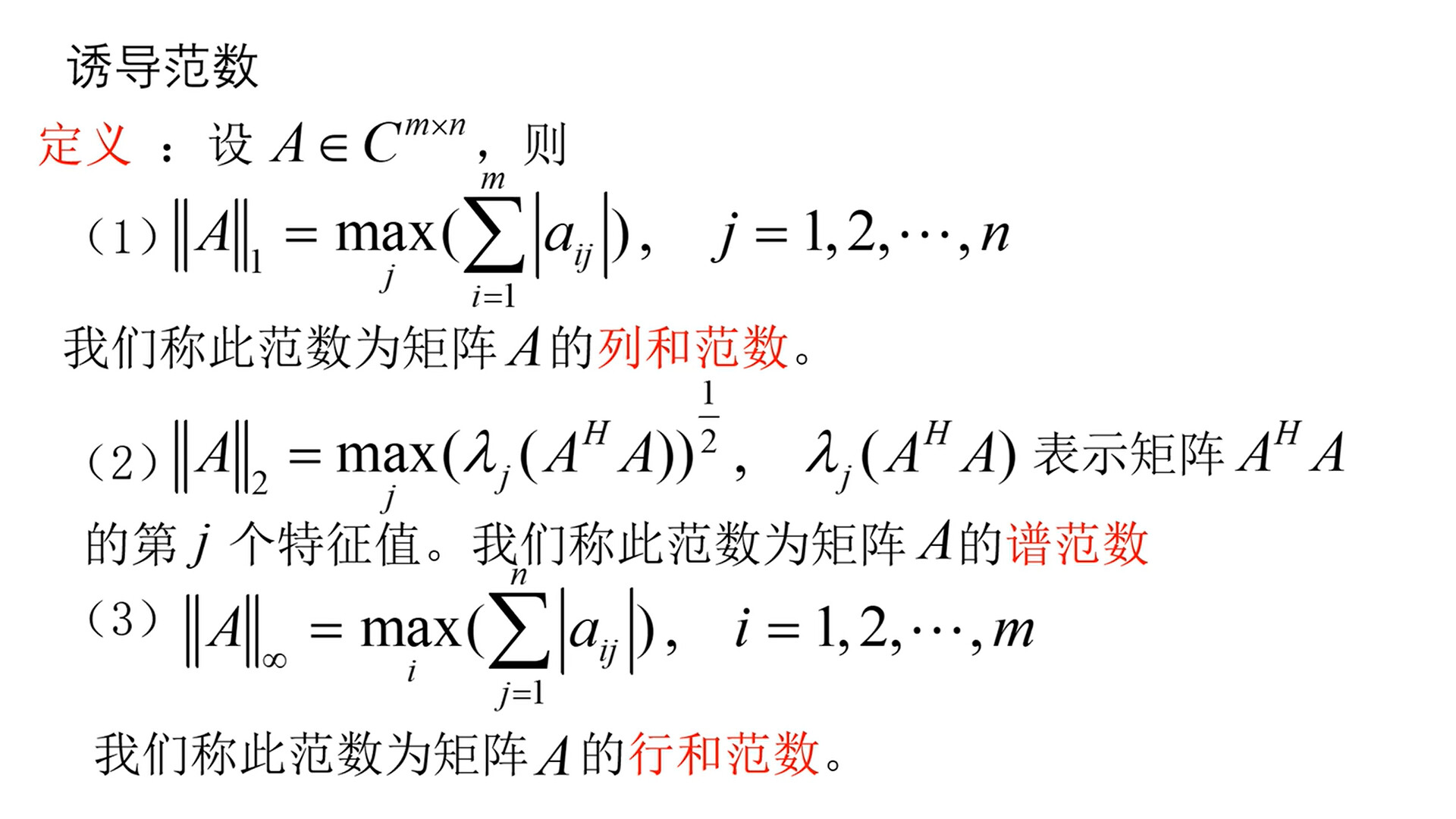
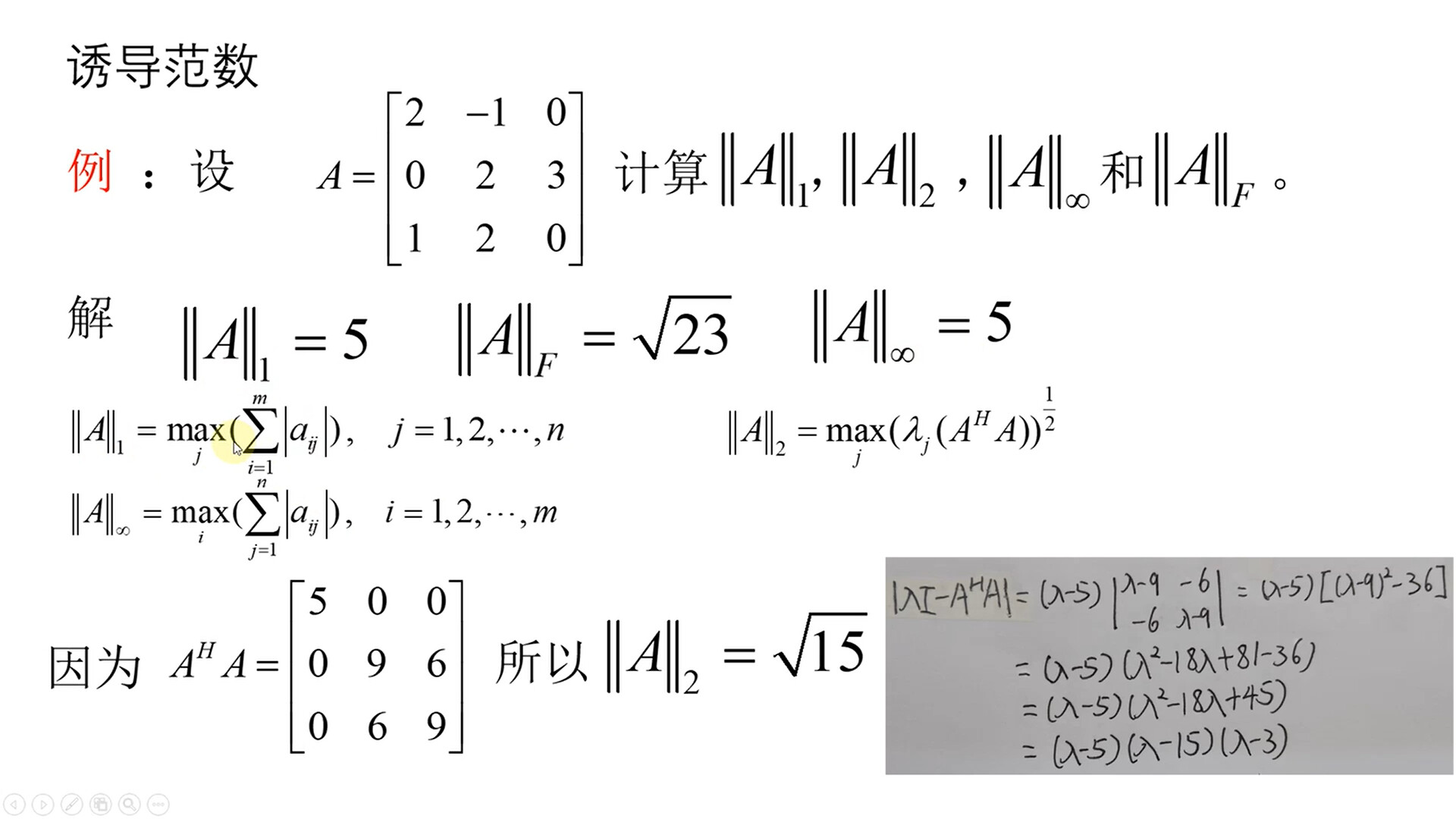
矩阵范数
谱半径
谱半径$f(A)$为矩阵的特征值的绝对值的最大值
小结
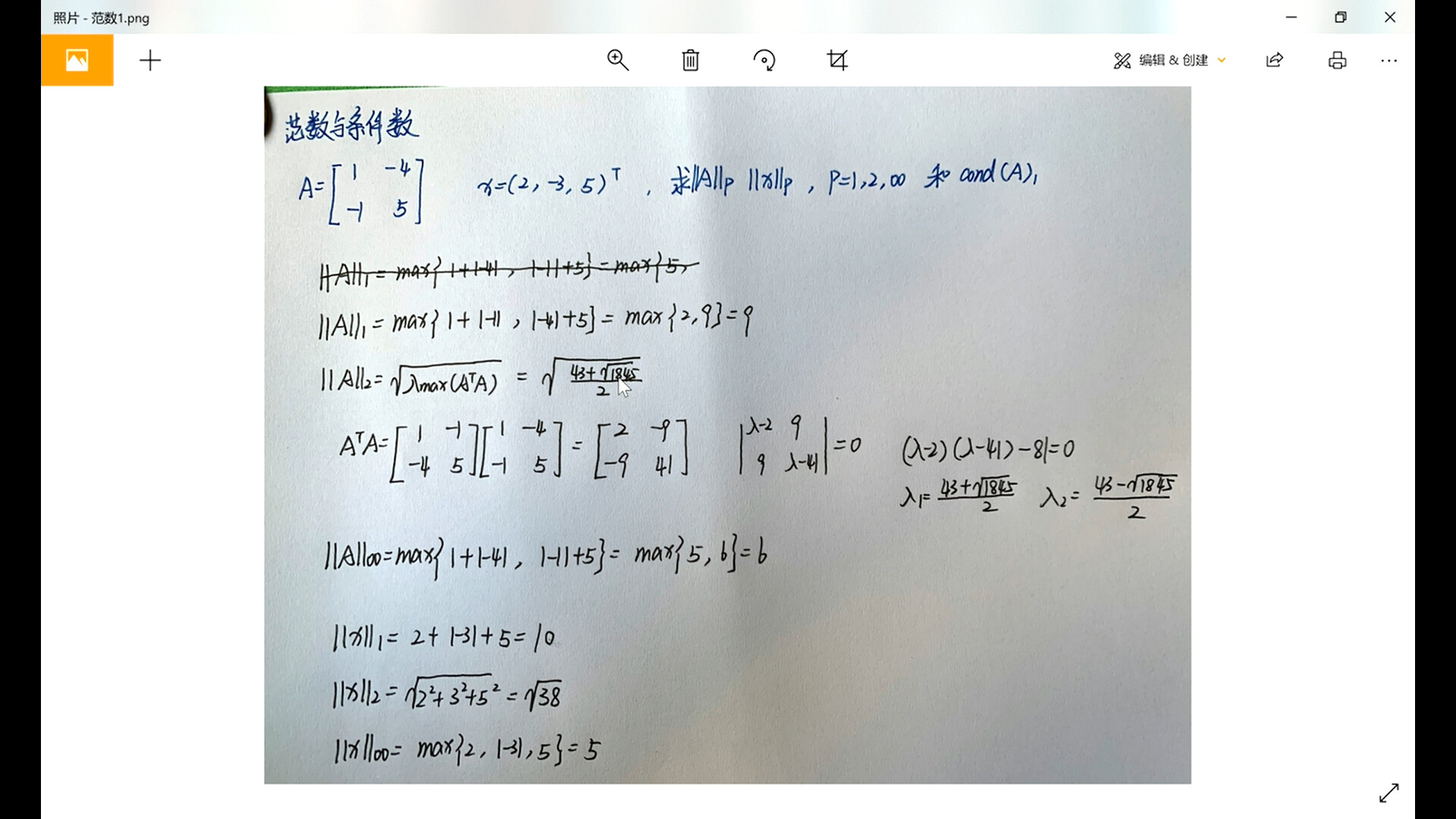
- 向量/矩阵的1范数都是求取列的绝对值之和,找出其中的最大值
- 向量/矩阵的无穷范数都是求取行的绝对值之和,找出其中的最大值
- 向量的2范数为每个元素的平方和开根号
- 矩阵的2范数需要求出$A^TA$矩阵的特征值,选取其中的最大值
线性方程组的误差分析
条件数
数值分析 范数与条件数 期末干货 期末突击_哔哩哔哩_bilibili
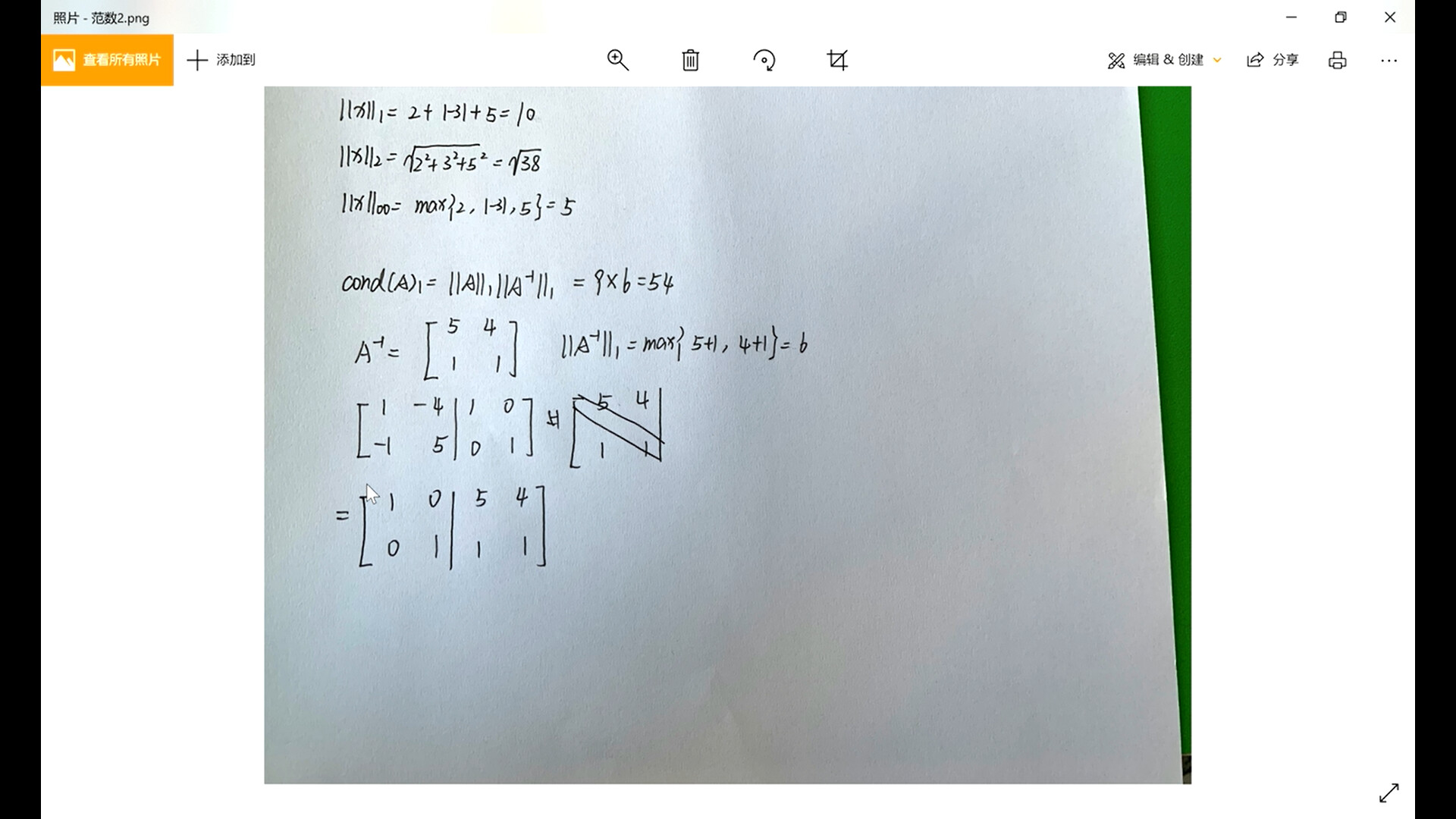
条件数$cond(A)_x$对应了范数$||A||_x||A^{-1}_x||$的乘积
矩阵求逆
上图中逆矩阵结果错误
二阶矩阵求逆可参考下面的公式
更高阶的求逆法:求逆矩阵的三种方法 - 哔哩哔哩 (bilibili.com)
雅各比方法和高斯-赛德尔方法
【数值分析】速成!雅可比迭代|高斯赛德尔迭代_哔哩哔哩_bilibili
数值分析|雅可比和高斯迭代|期末干货|期末突击_哔哩哔哩_bilibili
雅各比方法
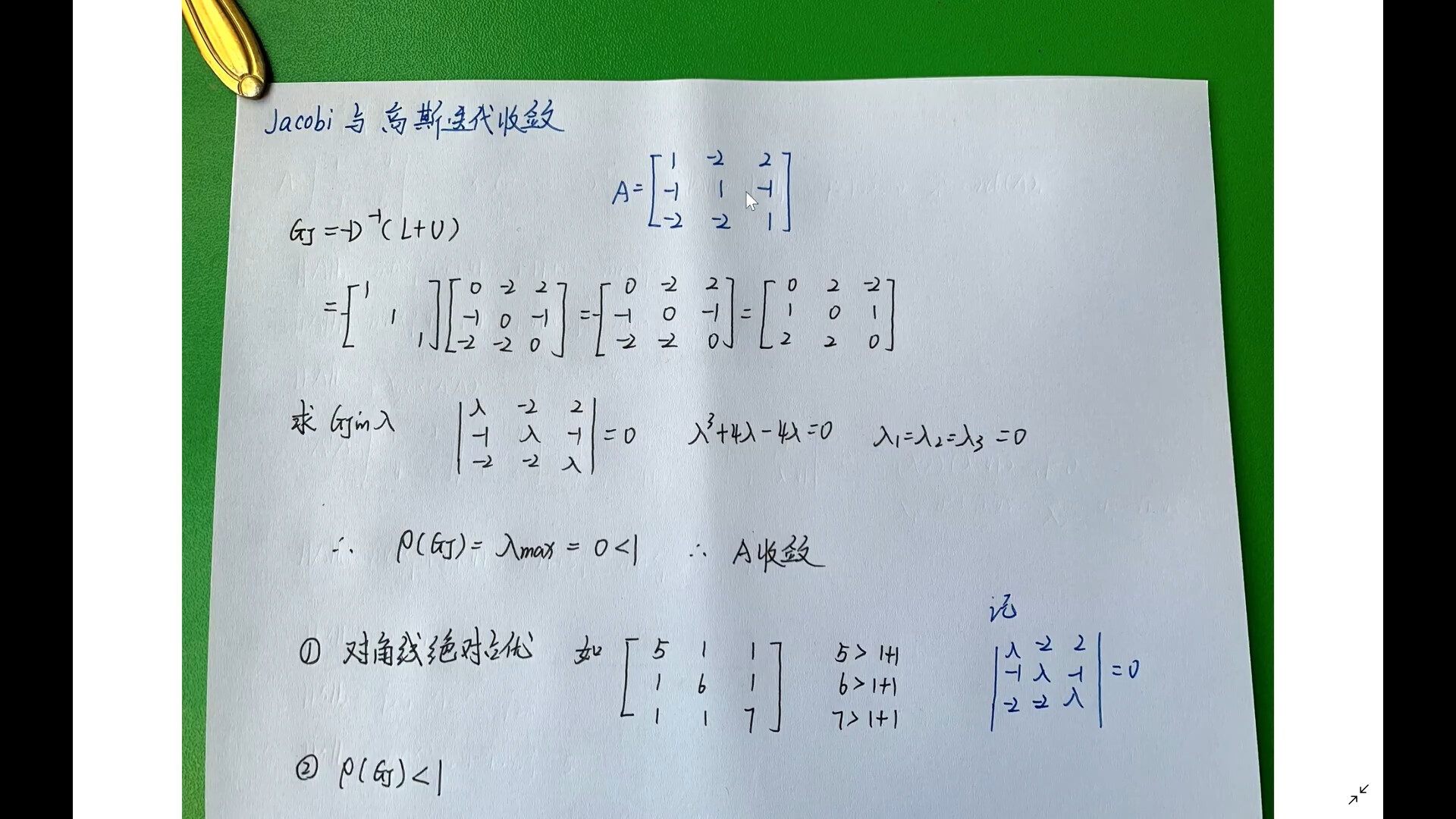
将给定的矩阵A拆解为$B = -D^{-1}(L+U)$,求解出$B$判断收敛:
- 对角线绝对占优,充分非必要
- 谱半径小于1
- 矩阵的特征值的最大的绝对值一项
高斯-赛德尔方法
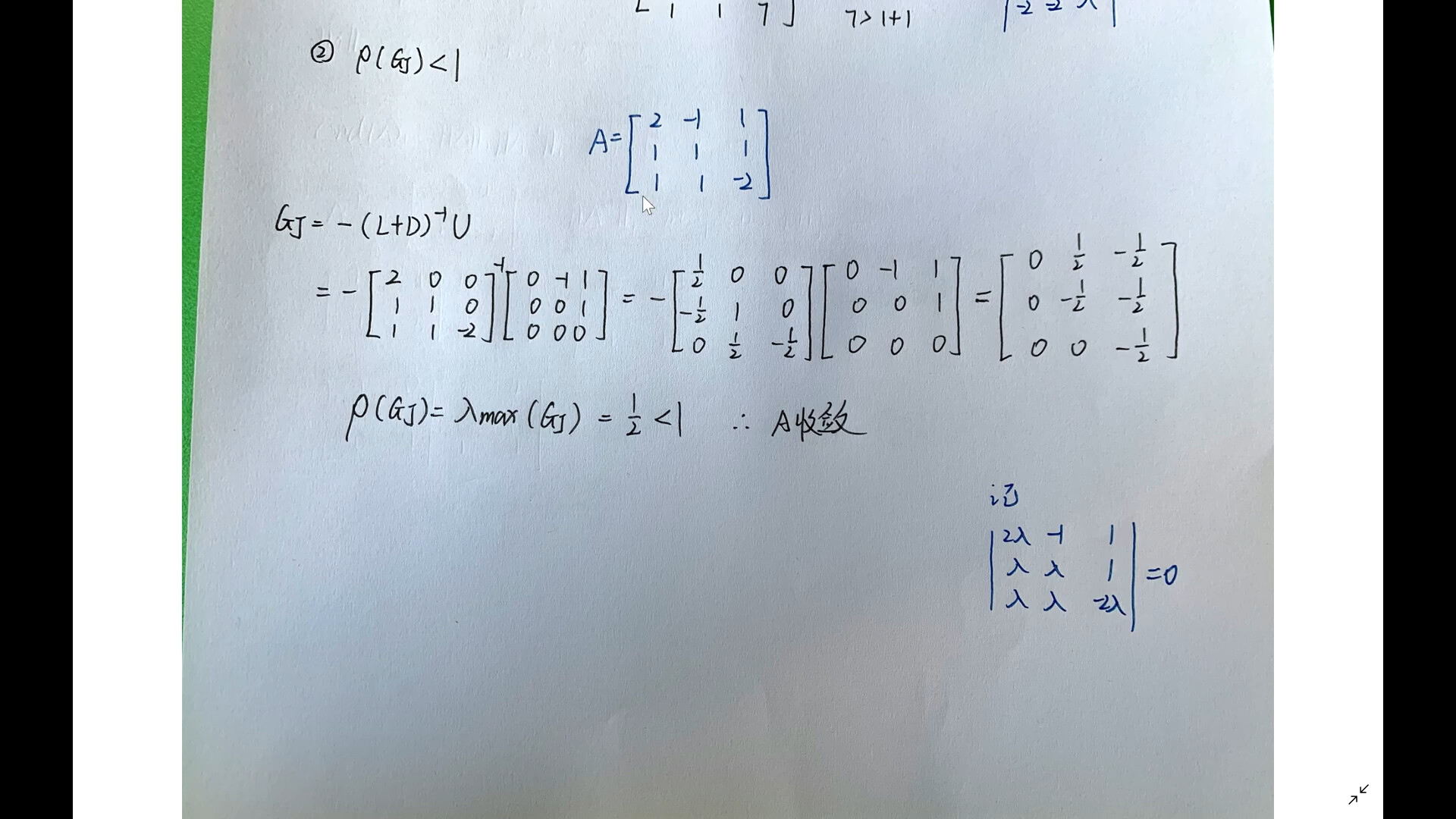
将给定的矩阵A拆解为$G = -(L+D)^{-1}U$,求解出$G$判断收敛:
- 谱半径小于1
- 矩阵的特征值的最大的绝对值一项
求矩阵的特征值性质与归纳
特征值之和等于矩阵的迹,即主对角线之和
对形如
$$
\left|
\matrix{
\lambda & -\frac{a}{n} & -\frac{b}{n} \
\frac{a}{n} & \lambda & -\frac{c}{n} \
\frac{b}{n} & \frac{c}{n} & \lambda \}
\right|
\Longrightarrow
\lambda(\lambda^{2} + \frac{a^2 + b^2 + c^2}{n^2})=0
$$
插值法
数值分析02-牛顿插值多项式(例题)Newton_哔哩哔哩_bilibili
数值分析01-拉格朗日插值多项式及其余项(例题)Lagrange_哔哩哔哩_bilibili
牛顿插值多项式
公式
$$
N_n(x) = y_0 + c_1(x-x_0) + c_2(x-x_0)(x-x_1) + c_3(x-x_0)(x-x_1)(x-x_2) + …
$$
其中$c_n$为差商
差商表
以
- 1,1
- 2,4
- 3,7
- 4,8
根据所给定数表求取差商表的过程:
| $k$ | $x_k$ | $f(x_k)$ | $c_1$ | $c_2$ | $c_3$ |
|---|---|---|---|---|---|
| 0 | 1 | 1 | |||
| 1 | 2 | 4 | $\frac{4-1}{2-1}=3$ | ||
| 2 | 3 | 7 | $\frac{7-4}{3-2}=3$ | $\frac{3-3}{3-1}=0$ | |
| 3 | 4 | 8 | $\frac{8-7}{4-3}=1$ | $\frac{1-3}{4-2}=-1$ | $\frac{0+1}{4-1}=\frac{1}{3}$ |
由此就可求多次牛顿差值多项式了
拉格朗日插值多项式
公式
以二次为例:
$$
\begin{aligned}
L_2(X)
&= l_0(x)y_0 + l_1(x)y_1 + l_2(x)y_2 \
&= \frac{(x-x_1)(x-x_2)}{(x_0-x_1)(x_0-x_2)}y_0 + \frac{(x-x_0)(x-x_2)}{(x_1-x_0)(x_1-x_2)}y_1 + \frac{(x-x_0)(x-x_1)}{(x_2-x_0)(x_2-x_1)}y_2
\end{aligned}
$$
插值多项式的误差/插值余项
无论是牛顿插值多项式还是拉格朗日插值多项式都存在误差,设其为$P_n(x)$,则对于插值余项$R_n(x)$:
$$
\begin{aligned}
R_n(x)
&= f(x) - P_n(x)\
&= \frac{f^{n+1}(\varepsilon)}{(n+1)!}W_{n+1}(x)
\end{aligned}
$$
其中
$$
W_{n+1}(x) = (x-x_0)(x-x_1)…(x-x_n)
$$
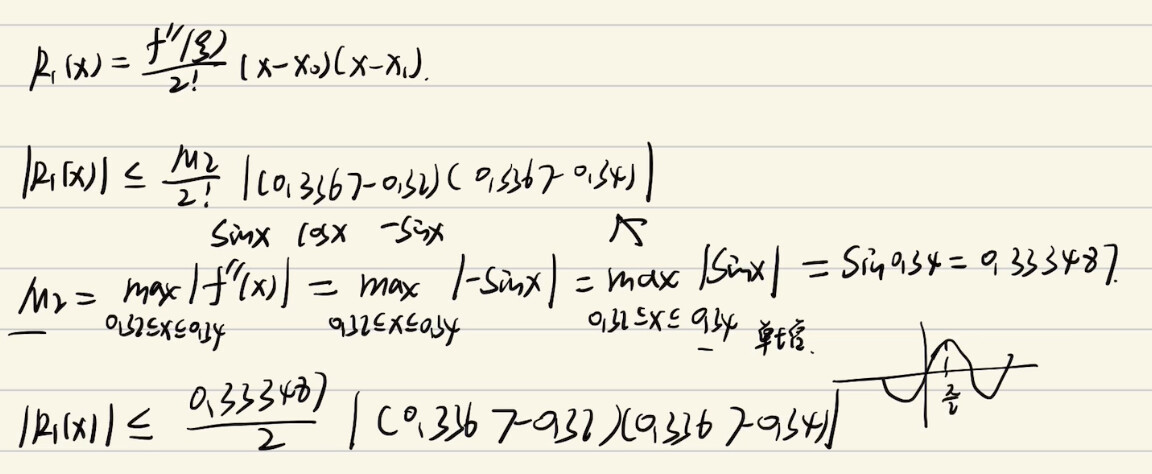
也可表示为:
$$
\begin{aligned}
|R_n(x)|
&\leq \frac{M_{n+1}}{(n+1)!}W_{n+1}(x)
\end{aligned}
$$
其中
$$
M_{n+1} = max|f^{n+1}(x)|,x_0 \leq x \leq x_n
$$
写题使用第二种方法,通过函数的特定次导数的最大绝对值求取插值余项
差商与导数之间的关系
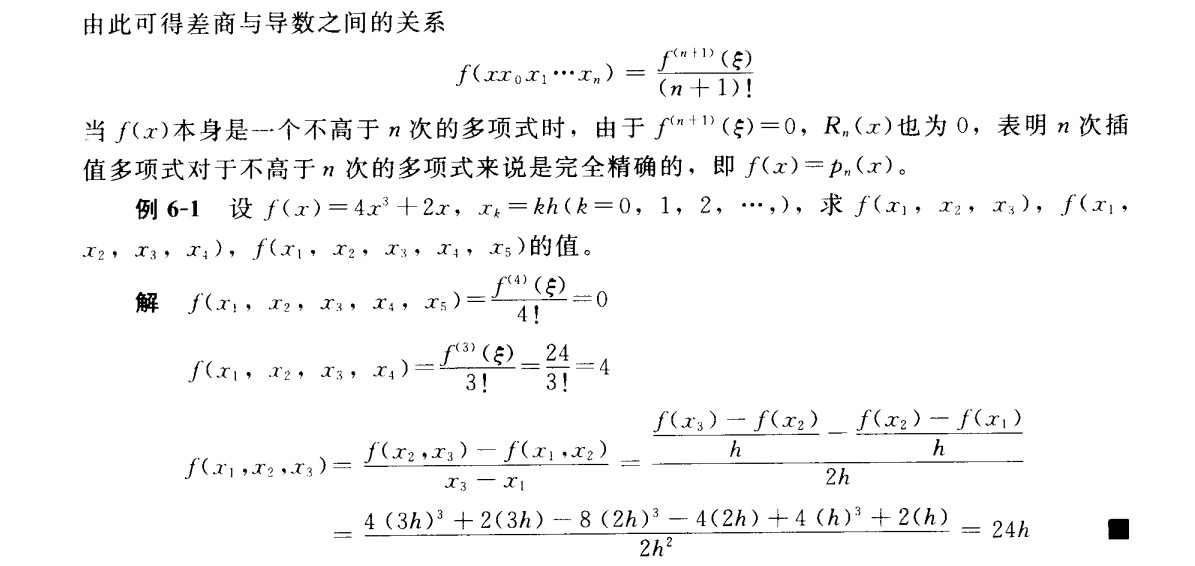
则可知使用五个点时就可得到完全精确的插值多项式了
如若导数中存在未知量$x$,则可用之前的方法计算差商
曲线拟合与函数逼近
曲线拟合的最小二乘法
三种求解方法
法一:
以
| 一 | 二 | 三 | |
|---|---|---|---|
| X | 1 | 2 | 3 |
| Y | 5 | 9 | 16 |
进行最小二乘法拟合的一次多项式:
设$p(x)=ax+b$,则
$$
\begin{aligned}
S
&= \sum_{i=1}^{3}[p(x_i)-y_i]^2\
&= (a+b-5)^2 + (2a+b-9)^2 + (3a+b-16)^2
\end{aligned}
$$
之后通过偏导为0求取$a、b$:
$$
\begin{cases}
\frac{\delta S}{\delta a} = 0 \
\frac{\delta S}{\delta b} = 0
\end{cases}
$$
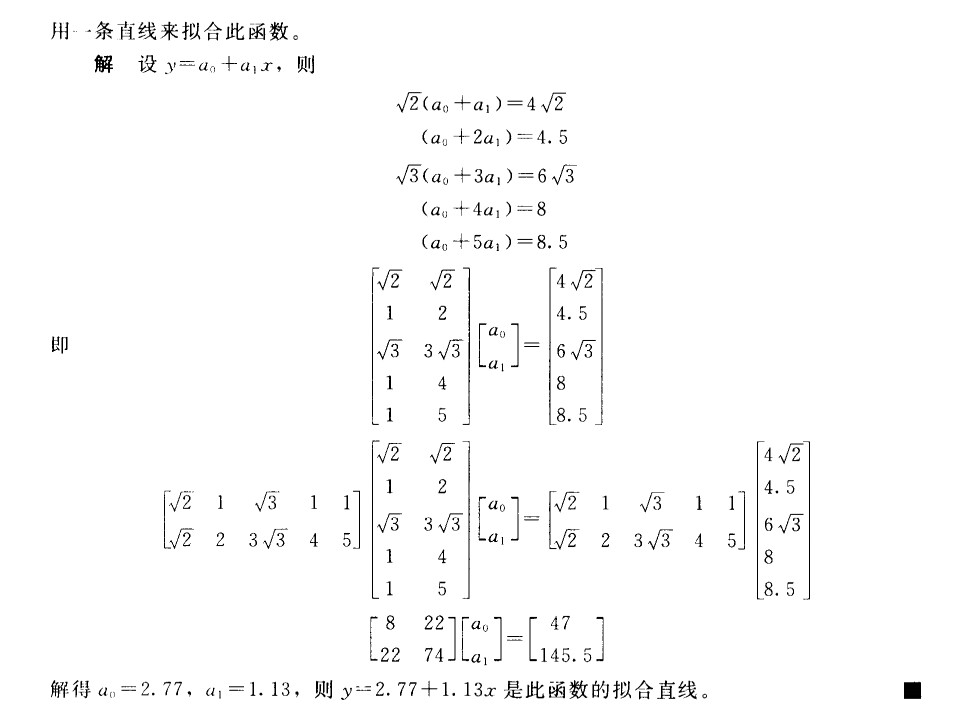
法二:
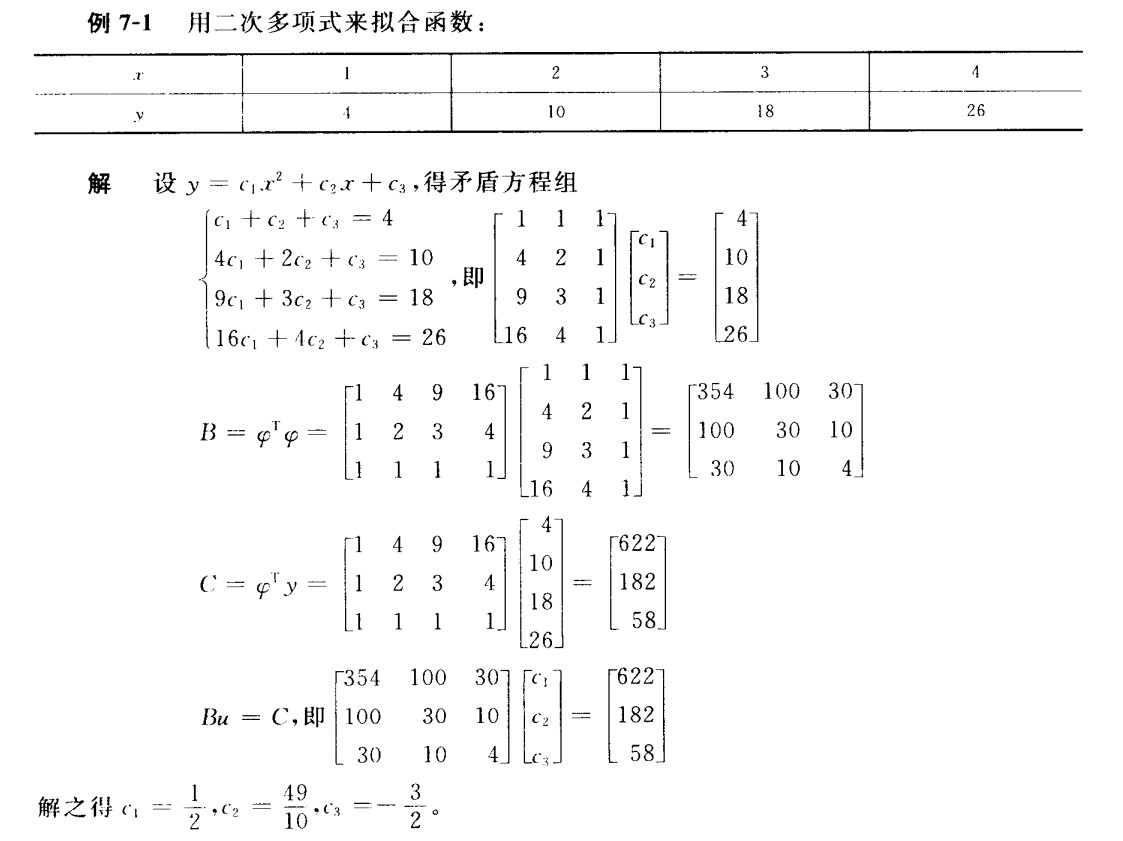
法三:
数值分析【题型六】最小二乘法求拟合曲线,均方误差的例题详解_哔哩哔哩_bilibili
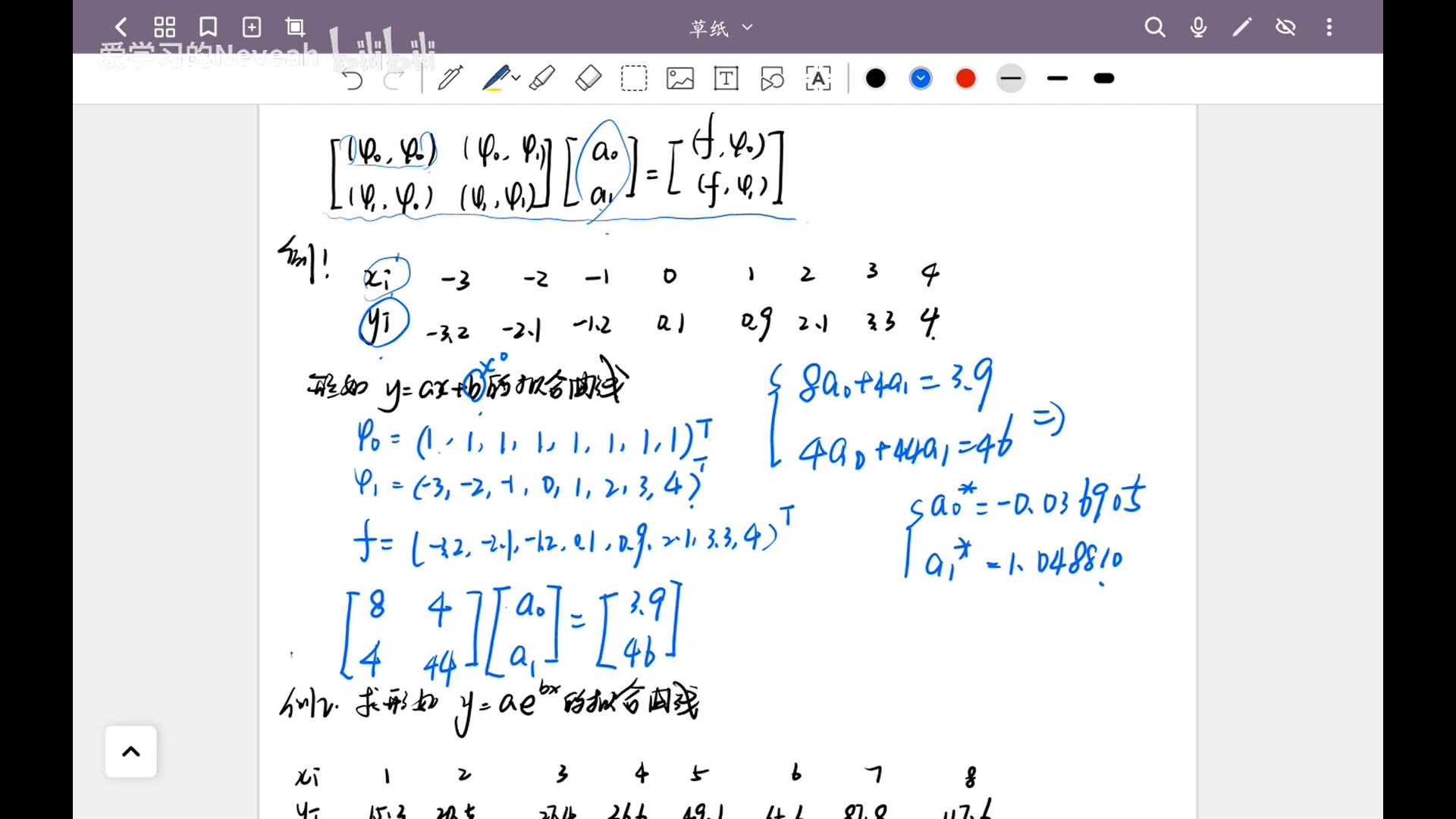
使用公式:
$$
\left[
\matrix
{
(\phi_0,\phi_0) & (\phi_0,\phi_1)\
(\phi_1,\phi_0) & (\phi_1,\phi_1)
}
\right]
\left[
\matrix
{
a_0\
a_1
}
\right]
=
\left[
\matrix
{
(f,\phi_0)\
(f,\phi_1)
}
\right]
$$
其中
- $\phi_0、\phi_1$对应$x_i$的0、1次方
- $f$对应$y_i$
- $a_i$为系数,即分别为$b、a$
- 内积的求取方式为对应位置元素乘积后求和
权
虽然都是离散的数据点,但有些点可能是多次测量的,那么就需要提高它在拟合时的占比

对于第三行的$w_i$,即为权
在构造矛盾方程组时,只需要等式两边同时乘上$\sqrt{w_i}$,之后正常计算即可
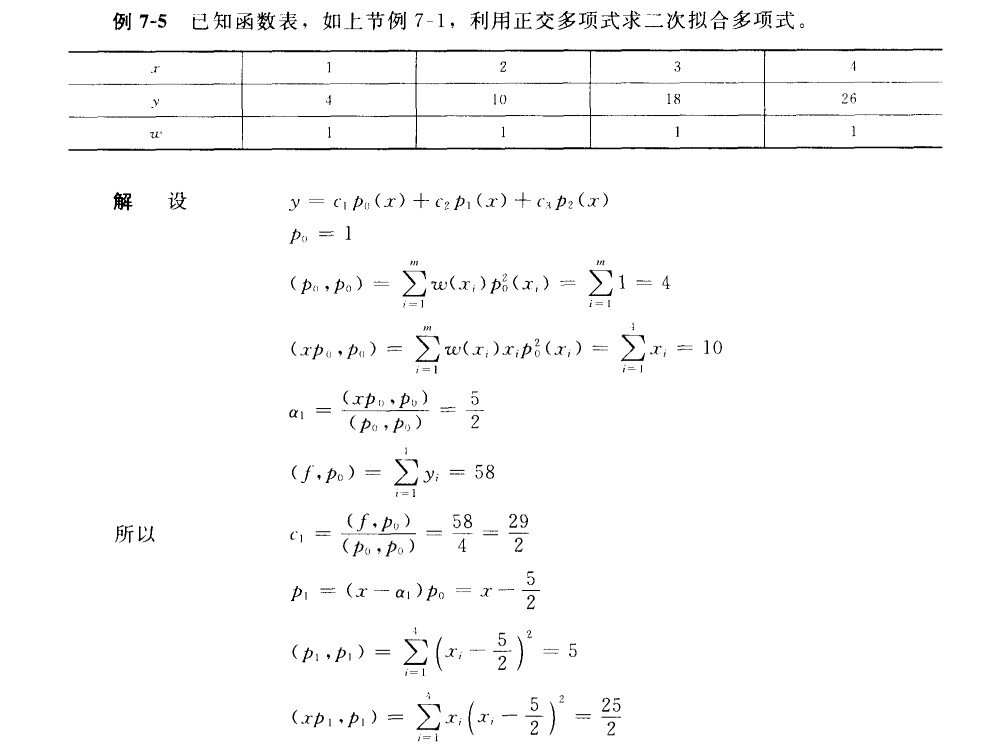
用正交函数作最小二乘拟合
求解方法
有递推公式:
$$
\begin{aligned}
&p_0(x) = 1\
&p_1(x) = (x-\alpha_1)p_0(x)\
&p_{k+1}(x) = (x-\alpha_{k+1})p_k(x)-\beta_kp_{k-1}(x)
\end{aligned}
$$
由正交性可定义:
$$
\begin{aligned}
&\alpha_{k+1} = \frac{(xp_k,p_k)}{(p_k,p_k)}\
&\beta_{k} = \frac{(xp_k,p_{k-1})}{(p_{k-1},p_{k-1})}\
&c_k = \frac{(f,p_{i-1})}{(p_{i-1},p_{i-1})}
\end{aligned}
$$
例题